Li Shuangshuang, Sun Haixin, Esmaiel Hamada
Key Laboratory of Underwater Acoustic Communication and Marine Information Technology, Ministry of Education, School of Informatics, Xiamen University, Xiamen 361005, China.
Department of Information and Communication, School of Informatics, Xiamen University, Xiamen 361005, China.
Sensors (Basel). 2020 Aug 10;20(16):4457. doi: 10.3390/s20164457.
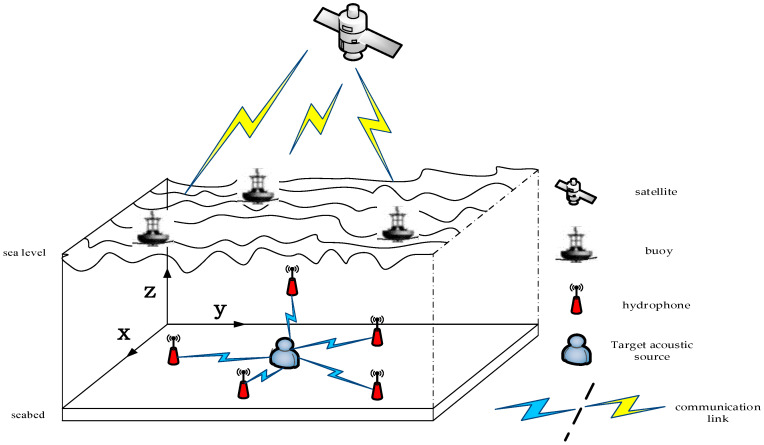
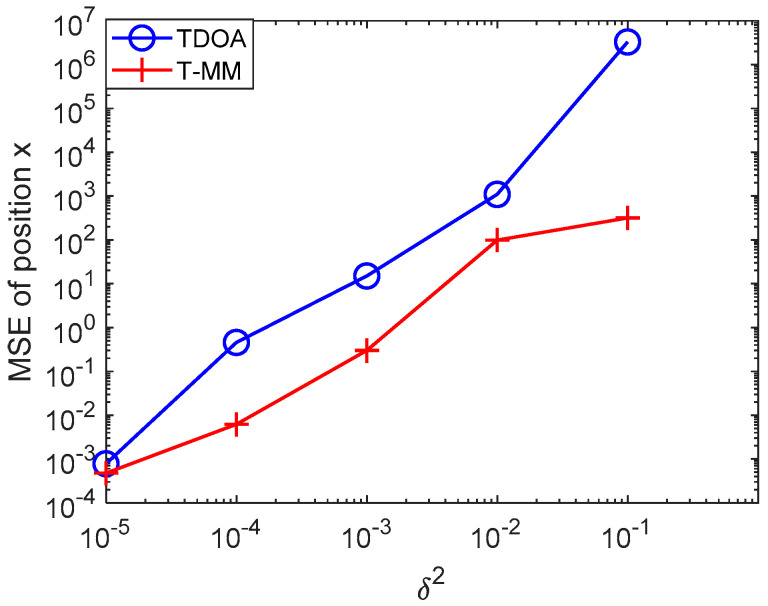
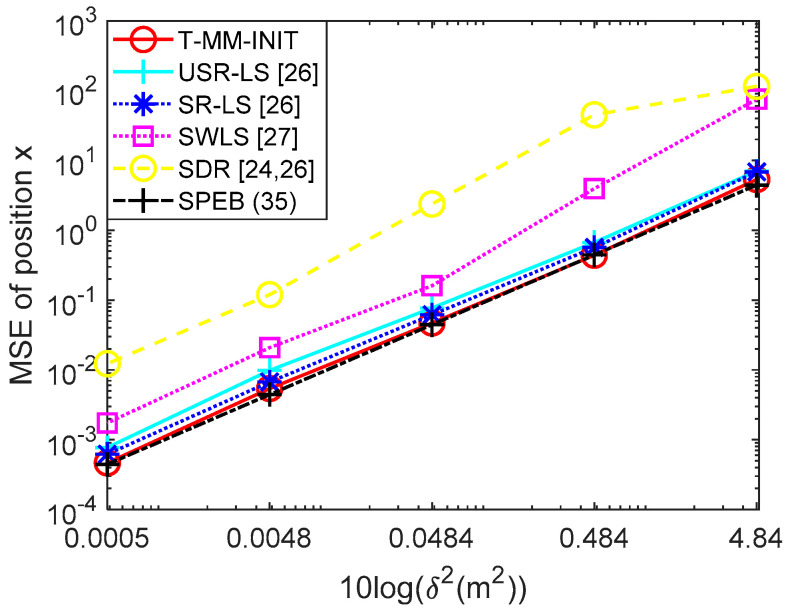
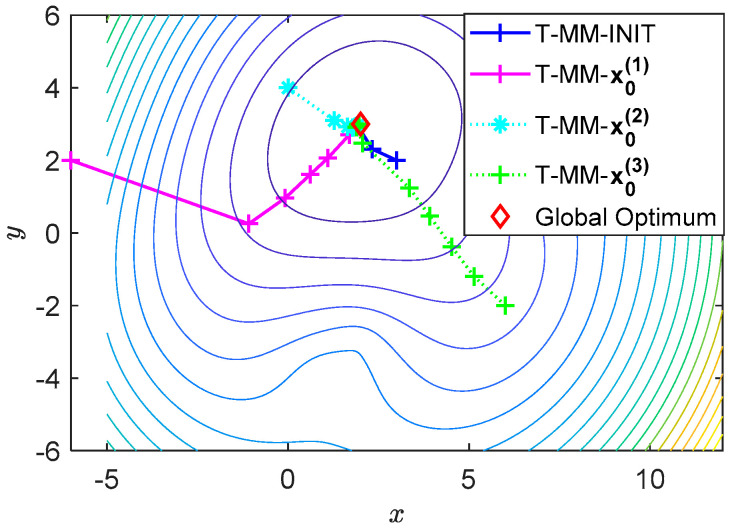
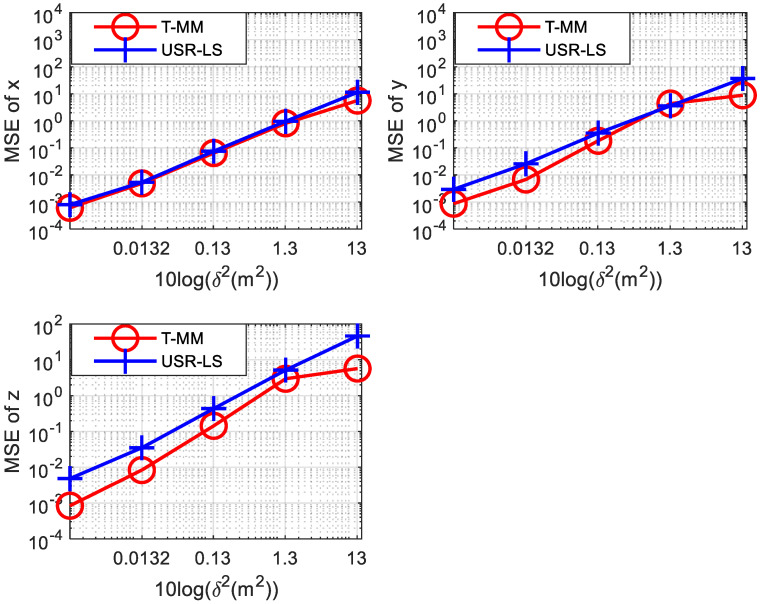
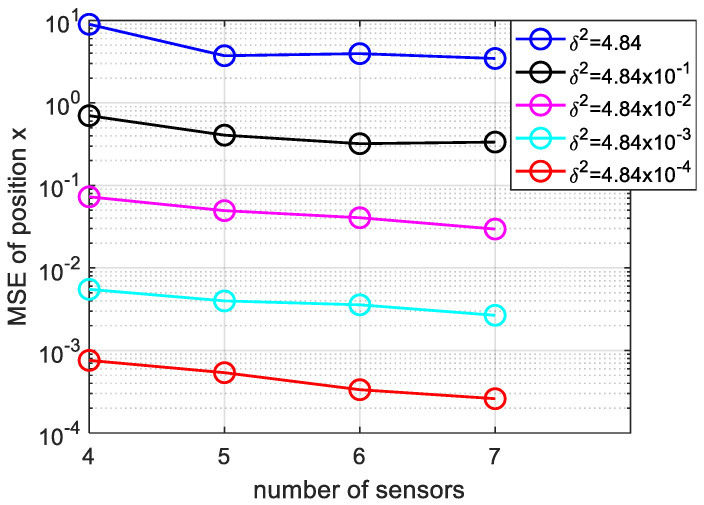
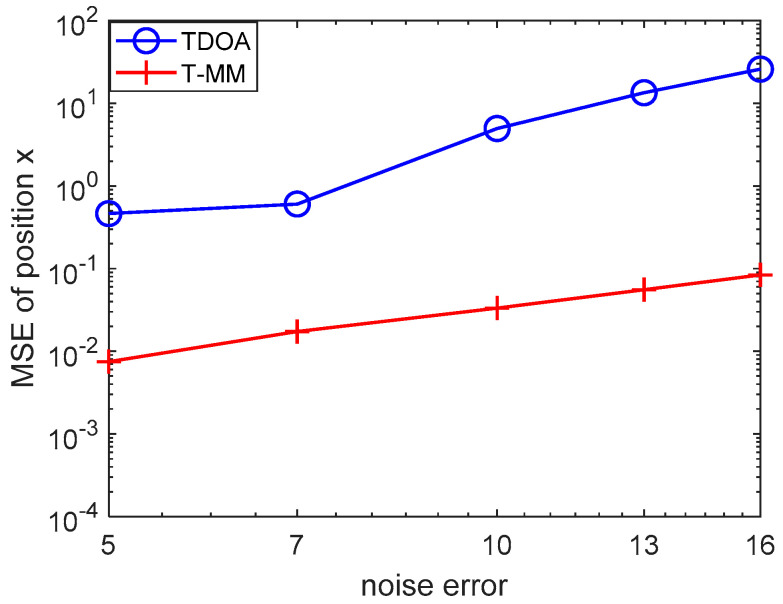
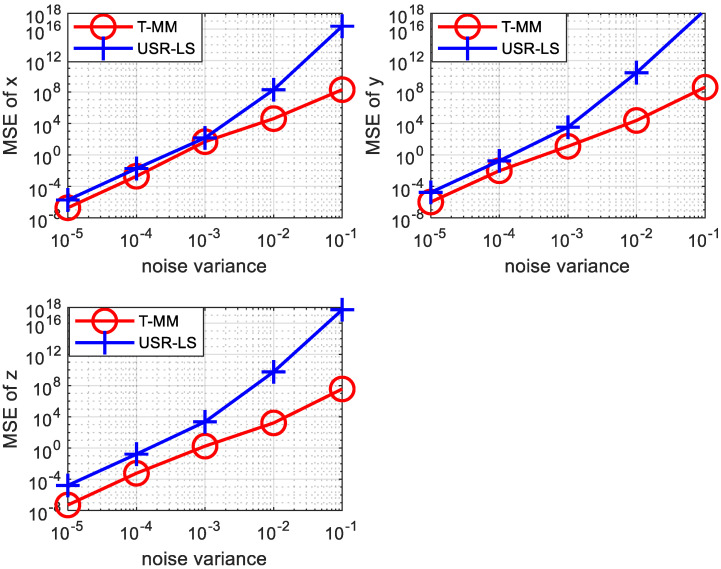
Underwater acoustic localization is a useful technique applied to any military and civilian applications. Among the range-based underwater acoustic localization methods, the time difference of arrival (TDOA) has received much attention because it is easy to implement and relatively less affected by the underwater environment. This paper proposes a TDOA-based localization algorithm for an underwater acoustic sensor network using the maximum-likelihood (ML) ratio criterion. To relax the complexity of the proposed localization complexity, we construct an auxiliary function, and use the majorization-minimization (MM) algorithm to solve it. The proposed localization algorithm proposed in this paper is called a T-MM algorithm. T-MM is applying the MM algorithm to the TDOA acoustic-localization technique. As the MM algorithm iterations are sensitive to the initial points, a gradient-based initial point algorithm is used to set the initial points of the T-MM scheme. The proposed T-MM localization scheme is evaluated based on squared position error bound (SPEB), and through calculation, we get the SPEB expression by the equivalent Fisher information matrix (EFIM). The simulation results show how the proposed T-MM algorithm has better performance and outperforms the state-of-the-art localization algorithms in terms of accuracy and computation complexity even under a high presence of underwater noise.
水下声学定位是一种应用于军事和民用领域的有用技术。在基于距离的水下声学定位方法中,到达时间差(TDOA)备受关注,因为它易于实现且受水下环境影响相对较小。本文提出了一种基于TDOA的水下声学传感器网络定位算法,该算法采用最大似然(ML)比准则。为了降低所提定位算法的复杂度,我们构造了一个辅助函数,并使用逐次逼近优化(MM)算法来求解。本文提出的定位算法称为T-MM算法。T-MM算法是将MM算法应用于TDOA声学定位技术。由于MM算法的迭代对初始点敏感,因此使用基于梯度的初始点算法来设置T-MM算法的初始点。基于位置误差平方界(SPEB)对所提的T-MM定位方案进行评估,并通过计算由等效费希尔信息矩阵(EFIM)得到SPEB表达式。仿真结果表明,所提的T-MM算法具有更好的性能,即使在水下噪声较高的情况下,在精度和计算复杂度方面也优于现有最先进的定位算法。