Industry and Transport Division, TECNALIA, Basque Research and Technology Alliance (BRTA), 20009 San Sebastián, Spain.
School of Aerospace, Transport and Manufacturing, Cranfield University, Cranfield, Bedfordshire MK43 0AL, UK.
Sensors (Basel). 2020 Oct 29;20(21):6151. doi: 10.3390/s20216151.
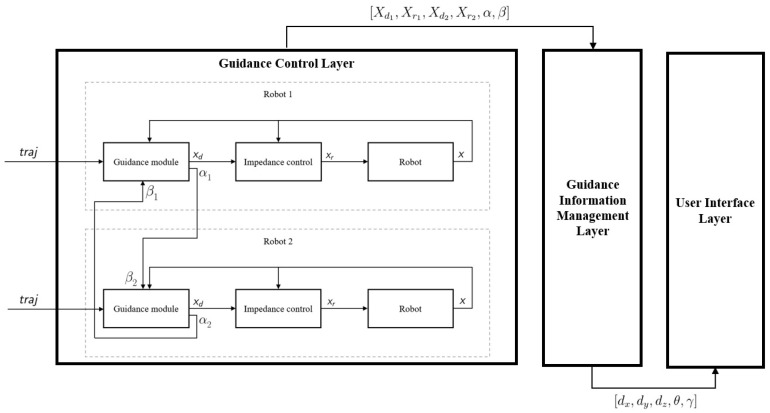
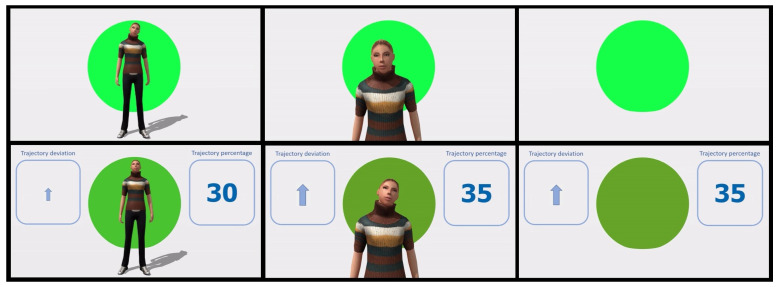
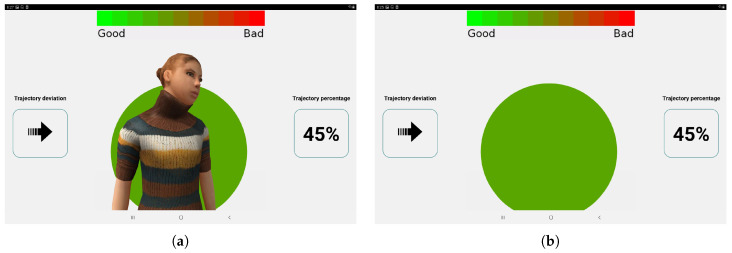
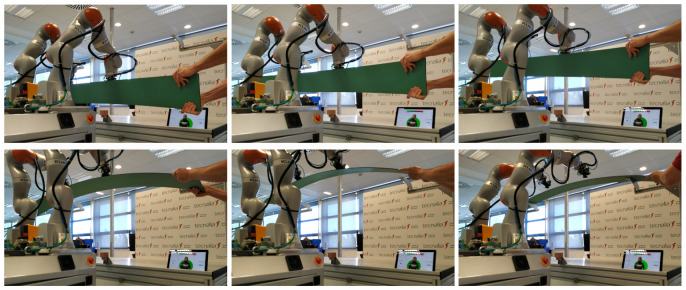
The emergence of collaborative robotics has had a great impact on the development of robotic solutions for cooperative tasks nowadays carried out by humans, especially in industrial environments where robots can act as assistants to operators. Even so, the coordinated manipulation of large parts between robots and humans gives rise to many technical challenges, ranging from the coordination of both robotic arms to the human-robot information exchange. This paper presents a novel architecture for the execution of trajectory driven collaborative tasks, combining impedance control and trajectory coordination in the control loop, as well as adding mechanisms to provide effective robot-to-human feedback for a successful and satisfactory task completion. The obtained results demonstrate the validity of the proposed architecture as well as its suitability for the implementation of collaborative robotic systems.
协作机器人的出现对当今人类完成的协作任务的机器人解决方案的发展产生了重大影响,特别是在工业环境中,机器人可以作为操作员的助手。即便如此,机器人和人类之间的大型部件的协调操作带来了许多技术挑战,从协调两个机械臂到人机信息交换。本文提出了一种用于执行轨迹驱动协作任务的新型架构,在控制回路中结合了阻抗控制和轨迹协调,以及添加了机制,为成功和满意地完成任务提供有效的机器人对人的反馈。所得结果证明了所提出的架构的有效性及其对协作机器人系统的实施的适用性。