Roveda Loris, Haghshenas Shaghayegh, Caimmi Marco, Pedrocchi Nicola, Molinari Tosatti Lorenzo
Institute of Intelligent Industrial Technologies and Systems for Advanced Manufacturing of National Research Council, Milan, Italy.
Istituto Dalle Molle di Studi sull'Intelligenza Artificiale, Scuola Universitaria Professionale della Svizzera Italiana, Università della Svizzera Italiana, Lugano, Switzerland.
Front Robot AI. 2019 Aug 21;6:75. doi: 10.3389/frobt.2019.00075. eCollection 2019.
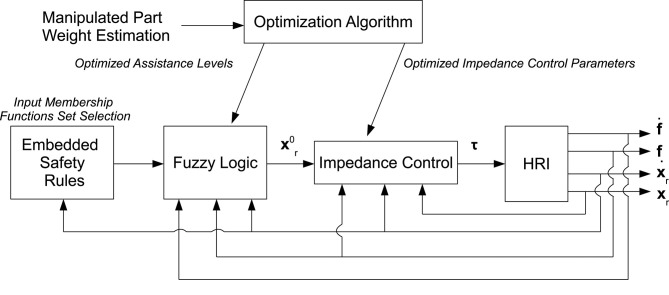
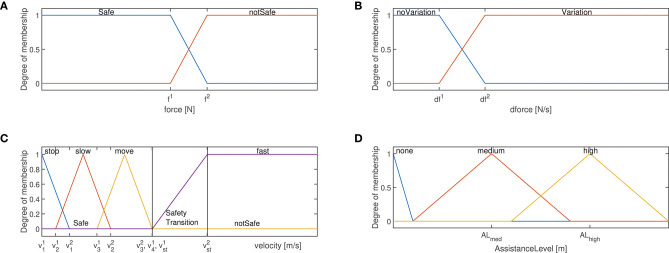
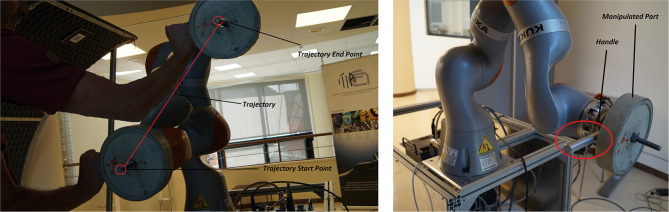
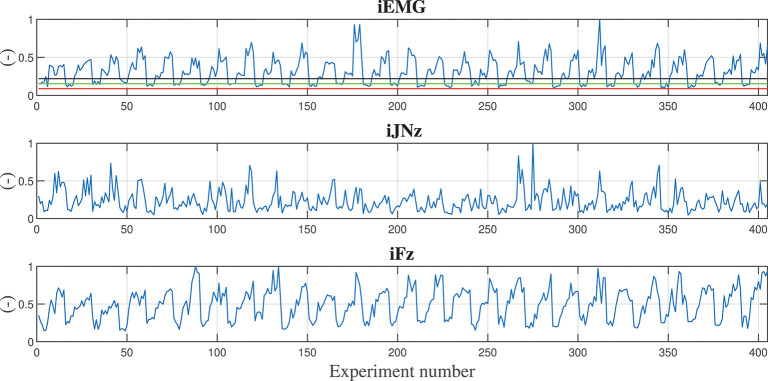
Human-robot cooperation is increasingly demanded in industrial applications. Many tasks require the robot to enhance the capabilities of humans. In this scenario, safety also plays an important role in avoiding any accident involving humans, robots, and the environment. With this aim, the paper proposes a cooperative fuzzy-impedance control with embedded safety rules to assist human operators in heavy industrial applications while manipulating unknown weight parts. The proposed methodology is composed by four main components: (i) an inner Cartesian impedance controller (to achieve the compliant robot behavior), (ii) an outer fuzzy controller (to provide the assistance to the human operator), (iii) embedded safety rules (to limit force/velocity during the human-robot interaction enhancing safety), and (iv) a neural network approach (to optimize the control parameters for the human-robot collaboration on the basis of the target indexes of assistance performance defined for this purpose). The main achieved result refers to the capability of the controller to deal with uncertain payloads while assisting and empowering the human operator, both embedding in the controller safety features at force and velocity levels and minimizing the proposed performance indexes. The effectiveness of the proposed approach is verified with a KUKA iiwa 14 R820 manipulator in an experimental procedure where human subjects evaluate the robot performance in a collaborative lifting task of a 10 kg part.
工业应用中对人机协作的需求日益增加。许多任务要求机器人增强人类的能力。在这种情况下,安全在避免涉及人类、机器人和环境的任何事故中也起着重要作用。出于这个目的,本文提出了一种带有嵌入式安全规则的协作模糊阻抗控制方法,以在重型工业应用中协助人类操作员操作未知重量的零件。所提出的方法由四个主要部分组成:(i) 一个内部笛卡尔阻抗控制器(以实现机器人的柔顺行为),(ii) 一个外部模糊控制器(为人类操作员提供协助),(iii) 嵌入式安全规则(在人机交互过程中限制力/速度以提高安全性),以及 (iv) 一种神经网络方法(根据为此定义的辅助性能目标指标优化人机协作的控制参数)。主要取得的成果是控制器能够在协助和增强人类操作员能力的同时处理不确定的负载,在力和速度层面将安全特性嵌入到控制器中,并使所提出的性能指标最小化。通过库卡iiwa 14 R820机器人在一个实验过程中验证了所提出方法的有效性,在该实验中人类受试者评估了机器人在搬运一个10千克零件的协作提升任务中的性能。