School of automation, Wuhan University of Technology, Wuhan 430070, China.
School of information engineering, Wuhan University of Technology, Wuhan 430070, China.
Sensors (Basel). 2020 Oct 29;20(21):6162. doi: 10.3390/s20216162.
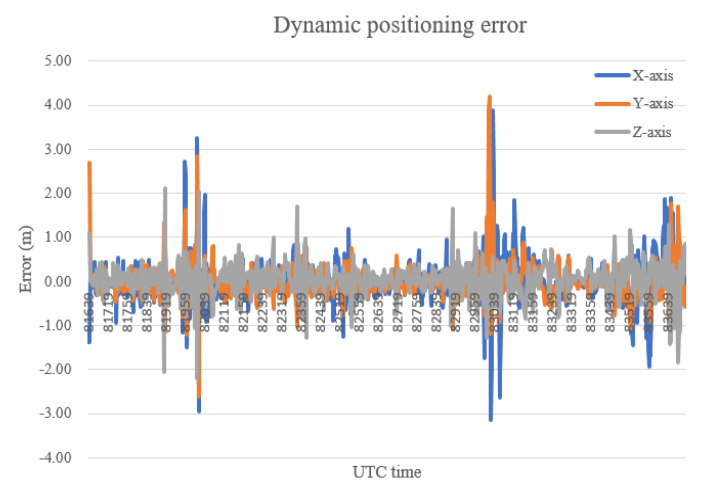
To improve the standard point positioning (SPP) accuracy of integrated BDS (BeiDou Navigation Satellite System)/GPS (Global Positioning System) at the receiver end, a novel approach based on Long Short-Term Memory (LSTM) error correction recurrent neural network is proposed and implemented to reduce the error caused by multiple sources. On the basis of the weighted least square (WLS) method and Kalman filter, the proposed LSTM-based algorithms, named WLS-LSTM and Kalman-LSTM error correction methods, are used to predict the positioning error of the next epoch, and the prediction result is used to correct the next epoch error. Based on the measured data, the results of the weighted least square method, the Kalman filter method and the LSTM error correction method were compared and analyzed. The dynamic test was also conducted, and the experimental results in dynamic scenarios were analyzed. From the experimental results, the three-dimensional point positioning error of Kalman-LSTM error correction method is 1.038 m, while the error of weighted least square method, Kalman filter and WLS-LSTM error correction method are 3.498, 3.406 and 1.782 m, respectively. The positioning error is 3.7399 m and the corrected positioning error is 0.7493 m in a dynamic scene. The results show that the LSTM-based error correction method can improve the standard point positioning accuracy of integrated BDS/GPS significantly.
为了提高接收机端集成北斗卫星导航系统(BDS)/全球定位系统(GPS)的标准点定位(SPP)精度,提出并实现了一种基于长短期记忆(LSTM)误差校正递归神经网络的新方法,以减少多源误差。在加权最小二乘(WLS)方法和卡尔曼滤波的基础上,提出了基于 LSTM 的算法,分别命名为 WLS-LSTM 和 Kalman-LSTM 误差校正方法,用于预测下一个历元的定位误差,并用预测结果来校正下一个历元的误差。基于实测数据,对加权最小二乘方法、卡尔曼滤波方法和 LSTM 误差校正方法的结果进行了比较和分析。还进行了动态测试,并对动态场景下的实验结果进行了分析。从实验结果来看,Kalman-LSTM 误差校正方法的三维点定位误差为 1.038 m,而加权最小二乘方法、卡尔曼滤波和 WLS-LSTM 误差校正方法的误差分别为 3.498、3.406 和 1.782 m。在动态场景中,定位误差为 3.7399 m,校正后的定位误差为 0.7493 m。结果表明,基于 LSTM 的误差校正方法可以显著提高集成 BDS/GPS 的标准点定位精度。