IEEE Trans Biomed Eng. 2021 Aug;68(8):2389-2399. doi: 10.1109/TBME.2020.3039404. Epub 2021 Jul 16.
Paralysis of the trunk results in seated instability leading to difficulties performing activities of daily living. Functional neuromuscular stimulation (FNS) combined with control systems have the potential to restore some dynamic functions of the trunk. However, design of multi-joint, multi-muscle control systems requires characterization of the stimulation-driven muscles responsible for movement.
This study characterizes the input-output properties of paralyzed trunk muscles activated by FNS, and explores co-activation of muscles.
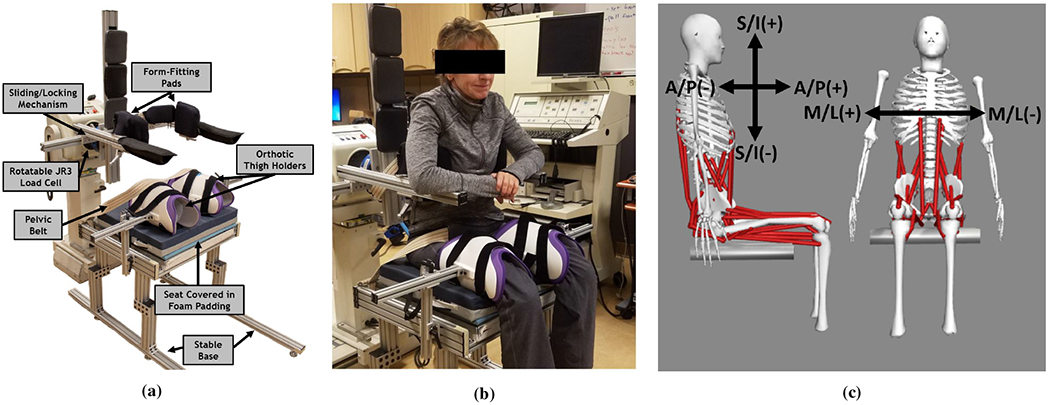
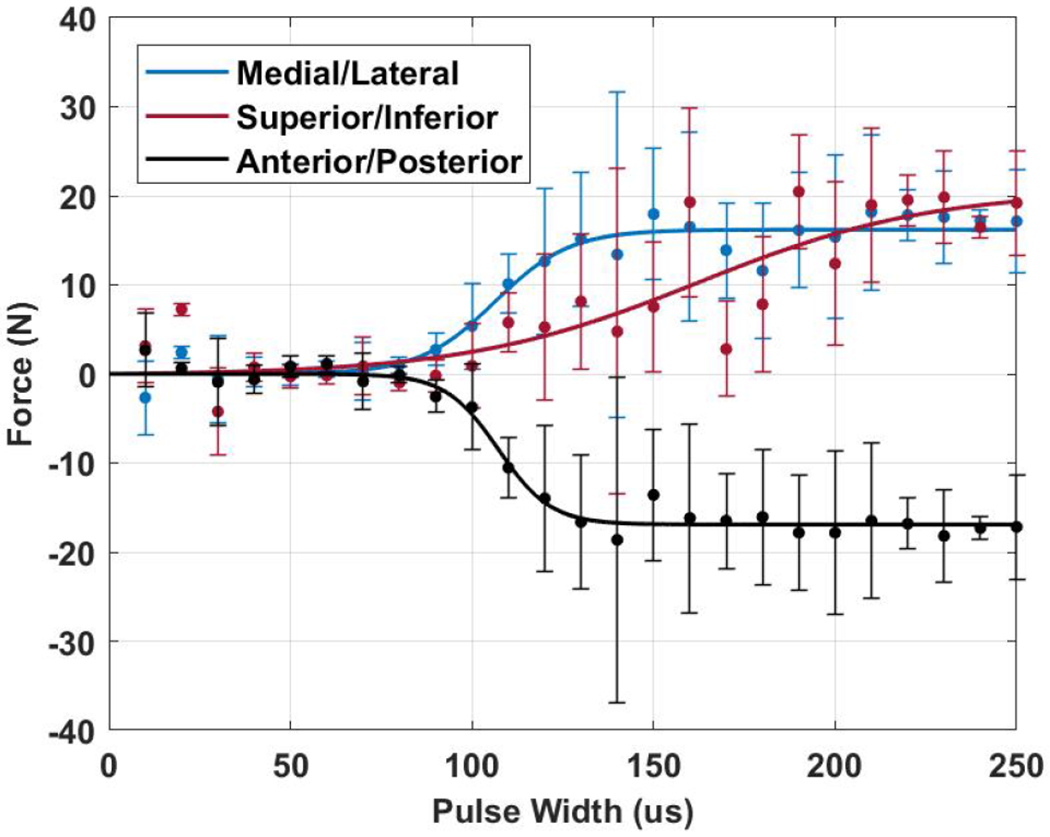
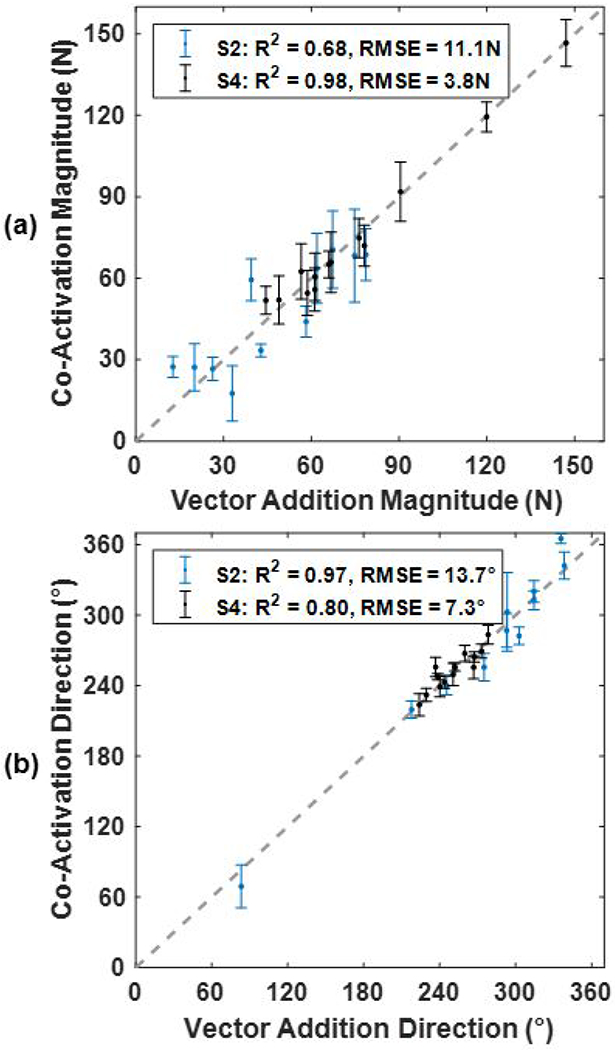
Four participants with various spinal cord injuries (C7 AIS-B, T4 AIS-B, T5 AIS-A, C5 AIS-C) were constrained so lumbar forces were transmitted to a load cell while an implanted neuroprosthesis activated otherwise paralyzed hip and paraspinal muscles. Isometric force recruitment curves in the nominal seated position were generated by inputting the level of stimulation (pulse width modulation) while measuring the resulting muscle force. Two participants returned for a second experiment where muscles were co-activated to determine if their actions combined linearly.
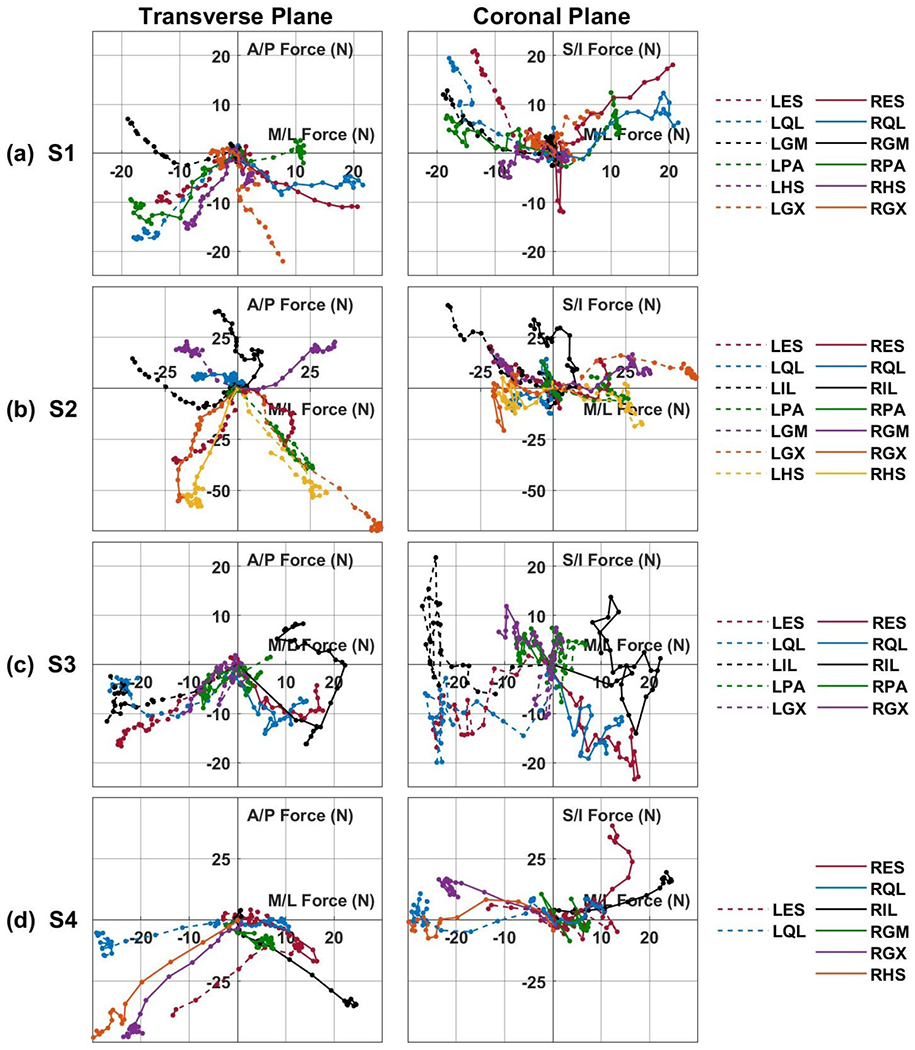
Recruitment curves of most trunk and hip muscles fit sigmoid shaped curves with a regression coefficient above 0.75, and co-activation of the muscles combined linearly across the hip and lumbar joint. Subject specific perturbation plots showed one subject is capable of resisting up to a 300N perturbation anteriorly and 125N laterally; with some subjects falling considerably below these values.
Development of a trunk stability control system can use sigmoid recruitment dynamics and assume muscle forces combine linearly.
This study informs future designs of multi-muscle, and multi-dimensional FNS systems to maintain seated posture and stability.
躯干瘫痪导致坐姿不稳定,从而难以完成日常生活活动。功能性神经肌肉刺激(FNS)与控制系统相结合,有可能恢复躯干的一些动态功能。然而,多关节、多肌肉控制系统的设计需要对负责运动的刺激驱动肌肉进行特征描述。
本研究描述了 FNS 激活的瘫痪躯干肌肉的输入-输出特性,并探讨了肌肉的共同激活。
4 名患有各种脊髓损伤(C7 AIS-B、T4 AIS-B、T5 AIS-A、C5 AIS-C)的参与者被约束,使腰椎力传递到负载细胞,同时植入的神经假体激活否则瘫痪的臀部和腰部肌肉。通过输入刺激水平(脉冲宽度调制)来生成名义坐姿中的等长力募集曲线,同时测量产生的肌肉力。两名参与者返回进行第二次实验,在该实验中肌肉共同激活,以确定它们的动作是否线性组合。
大多数躯干和臀部肌肉的募集曲线符合 S 形曲线,回归系数高于 0.75,并且肌肉在髋关节和腰椎关节处共同激活呈线性组合。针对个体的扰动图表明,一名参与者能够抵抗高达 300N 的向前和 125N 的侧向扰动;而有些参与者则远低于这些值。
躯干稳定性控制系统的开发可以使用 S 形募集动力学,并假设肌肉力呈线性组合。
本研究为未来的多肌肉、多维 FNS 系统的设计提供了信息,以维持坐姿和稳定性。