School of Mechanical Engineering, Sichuan University, Chengdu, China.
School of Mechanical Engineering, Sichuan University Jinjiang College, Pengshan, China.
Sci Prog. 2020 Oct-Dec;103(4):36850420981220. doi: 10.1177/0036850420981220.
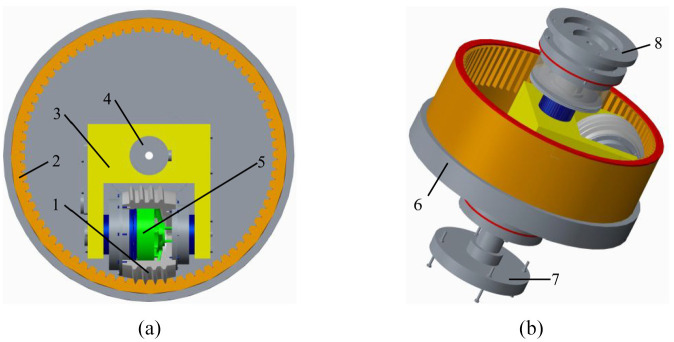
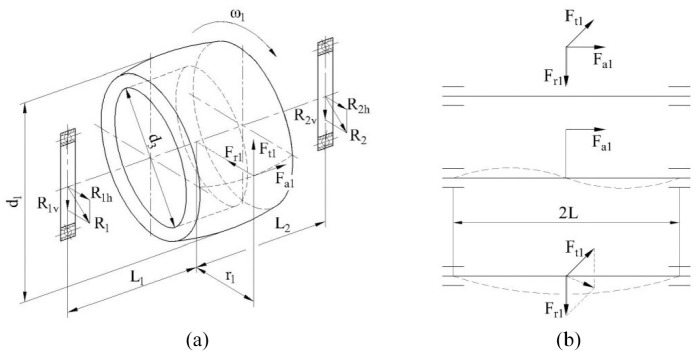
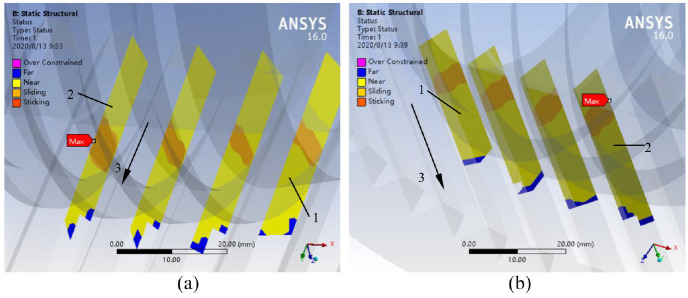
Although a significant amount of research on robot joint reducer was conducted, there are few systematic investigations on a novel joint reducer adopting inner worm-gear plane enveloping drum worm drive. To satisfy the development of modular robot joint, the primary objective of this paper was to systematically investigate the drum worm drive adopted in the novel joint reducer with integrated structure of drive, transmission, and support in the following aspects: meshing theory, design, analysis, and manufacture. According to the gear meshing theory, mechanical design method, classical mechanics, finite element method, and machining principle of virtual center distance, the systematic investigations around the drum worm pair applied in the novel joint reducer were conducted including the macro and micro meshing theory, structure design, mechanical and contact properties analyses, and manufacturing method. The novel joint reducer's integrated structure was designed, and the drum worm pair's mechanical and contact properties analyses were conducted, which showed: (1) the worm's bending stress and deflection, worm-gear teeth's shear stress and bending stress as well as the maximum contact stresses were all below their corresponding allowable values; (2) the maximum contact stresses appeared at the engage-in position of the worm pair opposing to the engaging-out position where the largest contact areas appeared. Then the manufacturing of drum worm's spiral tooth was conducted via the modified 4-axis linkage CNC grinder according to the conjugate motion. Finally the novel joint reducer's industrial prototype was assembled. The novel joint reducer with integrated structure of drive, transmission and support was designed and manufactured for the first time. The flowchart of design and manufacture of the reducer's drum worm pair in this process was formulated, which provides a new insight on the research of joint reducers as well as other fields.
尽管已经对机器人关节减速器进行了大量研究,但对于采用内齿轮平面包络鼓形蜗杆传动的新型关节减速器,系统研究却很少。为了满足模块化机器人关节的发展需求,本文的主要目的是从啮合理论、设计、分析和制造等方面,对采用一体化传动、支承结构的新型关节减速器中的鼓形蜗杆传动进行系统研究。根据齿轮啮合理论、机械设计方法、经典力学、有限元法和虚拟中心距加工原理,对应用于新型关节减速器中的鼓形蜗杆副进行了系统研究,包括宏观和微观啮合理论、结构设计、力学和接触特性分析以及制造方法。设计了新型关节减速器的一体化结构,对鼓形蜗杆副的力学和接触特性进行了分析,结果表明:(1)蜗杆的弯曲应力和挠度、蜗轮轮齿的剪切应力和弯曲应力以及最大接触应力均低于各自的允许值;(2)最大接触应力出现在与啮合出位置相对的蜗杆副啮合入位置,此处出现了最大的接触面积。然后,根据共轭运动,采用改进的四轴联动数控磨床对鼓形蜗杆的螺旋齿进行了制造。最后,组装了新型关节减速器的工业样机。首次设计和制造了具有驱动、传动和支承一体化结构的新型关节减速器。制定了该减速器鼓形蜗杆副设计和制造的流程图,为关节减速器及其他领域的研究提供了新的思路。