Islam Muhammad Raza Ul, Bai Shaoping
Department of Materials and Production, Aalborg University, Aalborg, Denmark.
Front Robot AI. 2020 Nov 16;7:567491. doi: 10.3389/frobt.2020.567491. eCollection 2020.
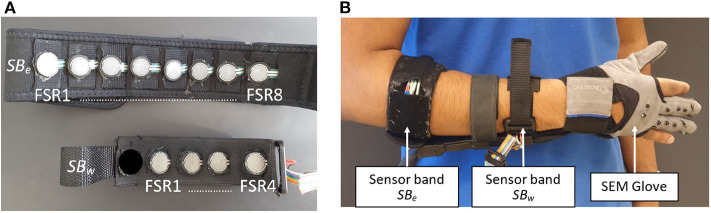
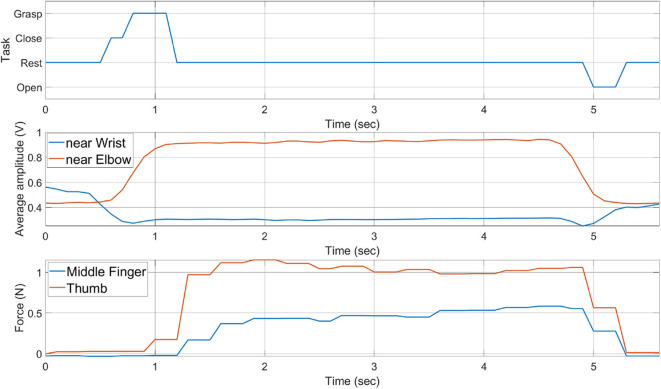
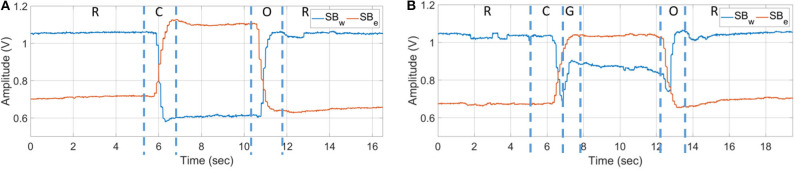
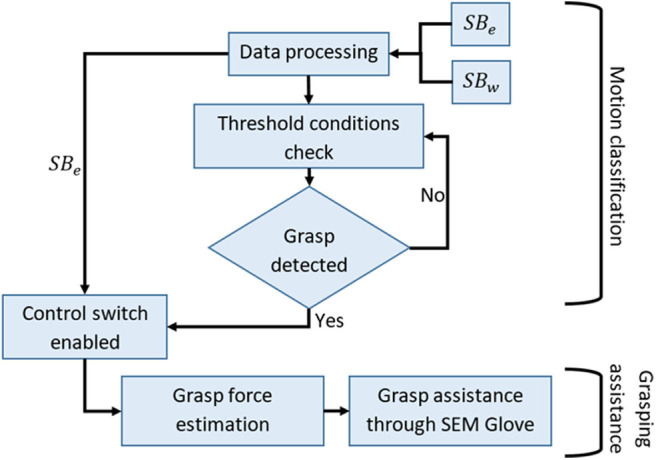
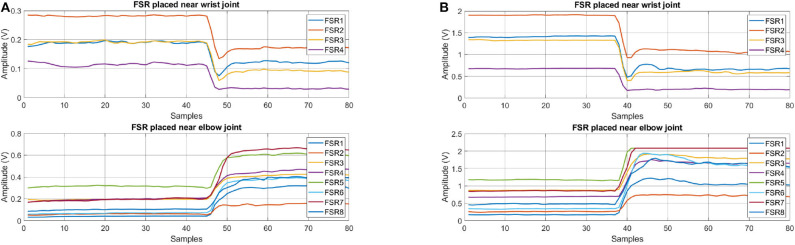
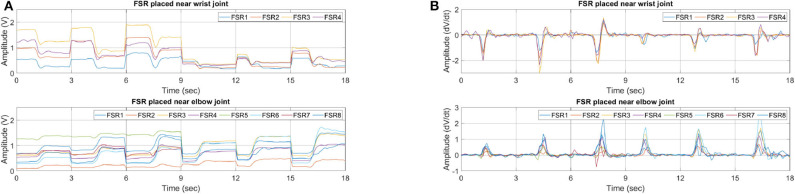
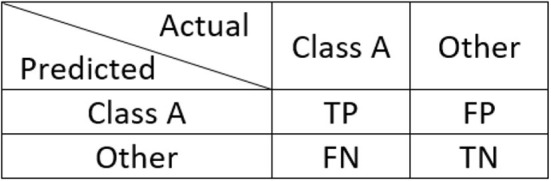
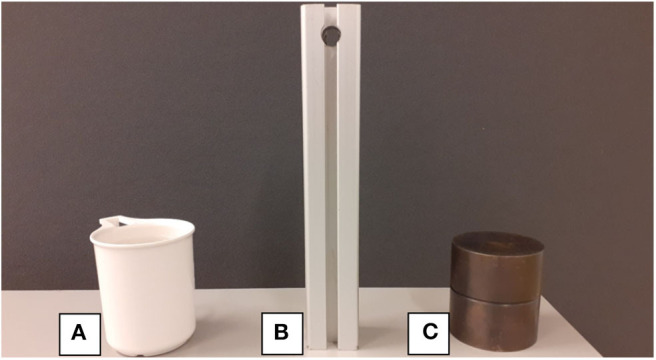
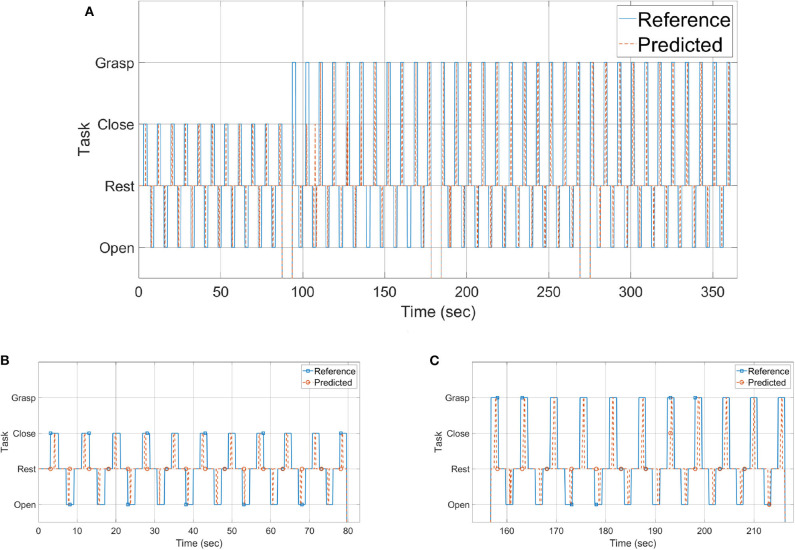
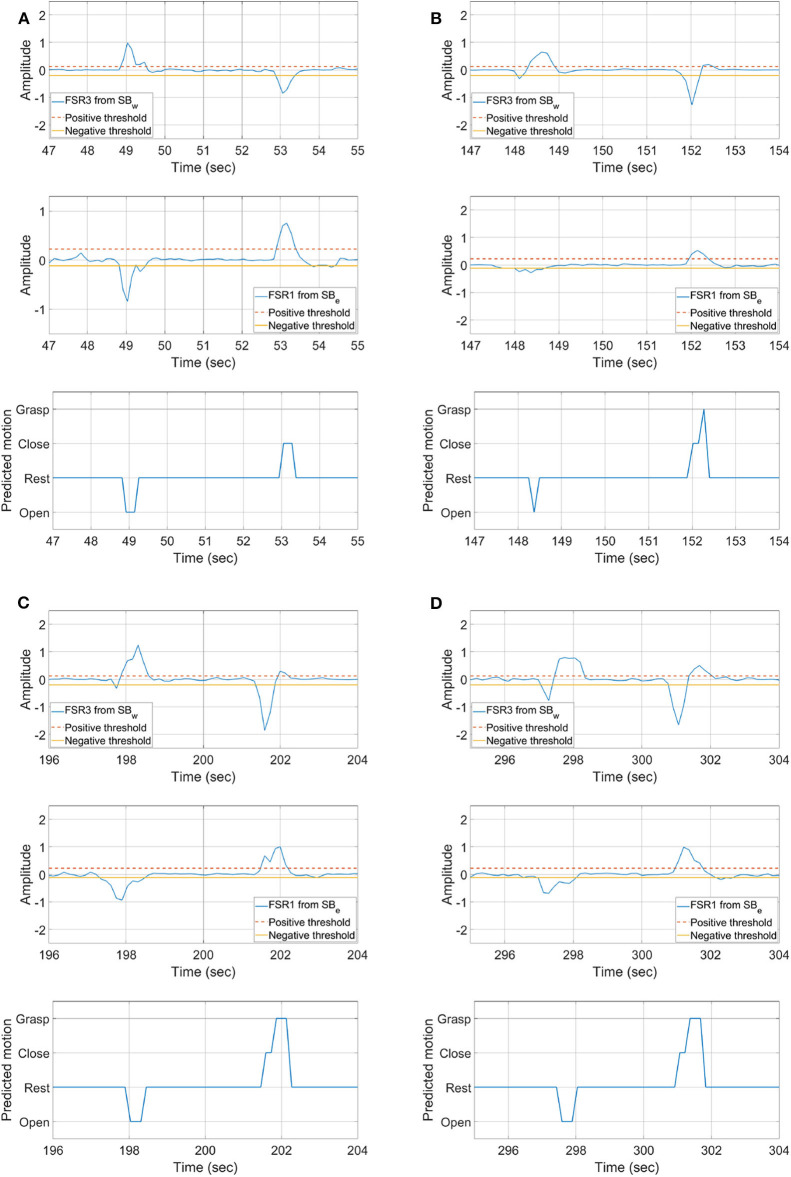
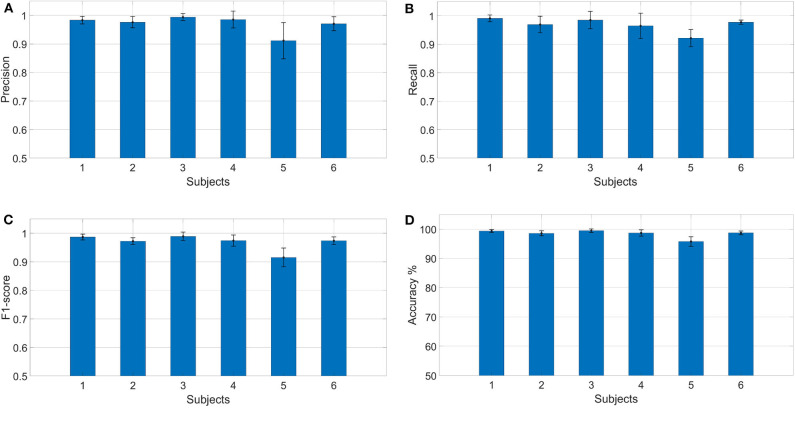
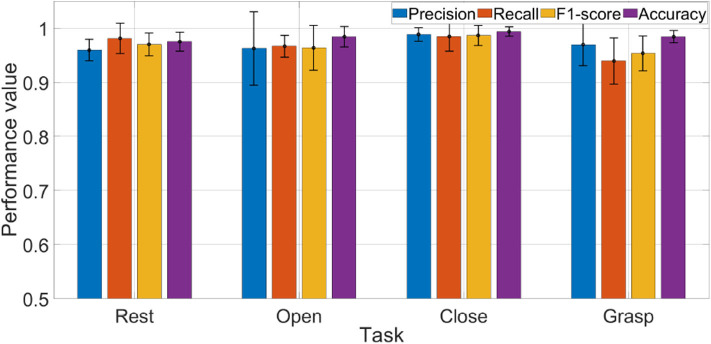
Human intention detection is fundamental to the control of robotic devices in order to assist humans according to their needs. This paper presents a novel approach for detecting hand motion intention, i.e., rest, open, close, and grasp, and grasping force estimation using force myography (FMG). The output is further used to control a soft hand exoskeleton called an SEM Glove. In this method, two sensor bands constructed using force sensing resistor (FSR) sensors are utilized to detect hand motion states and muscle activities. Upon placing both bands on an arm, the sensors can measure normal forces caused by muscle contraction/relaxation. Afterwards, the sensor data is processed, and hand motions are identified through a threshold-based classification method. The developed method has been tested on human subjects for object-grasping tasks. The results show that the developed method can detect hand motions accurately and to provide assistance w.r.t to the task requirement.
人类意图检测对于根据人类需求控制机器人设备至关重要。本文提出了一种新颖的方法,用于检测手部运动意图,即休息、张开、闭合和抓握,以及使用肌电描记法(FMG)估计抓握力。该输出进一步用于控制一种名为SEM手套的柔性手部外骨骼。在这种方法中,使用力敏电阻(FSR)传感器构建的两个传感器带被用于检测手部运动状态和肌肉活动。将两个传感器带放置在手臂上后,传感器可以测量由肌肉收缩/放松引起的法向力。然后,对传感器数据进行处理,并通过基于阈值的分类方法识别手部运动。所开发的方法已在人类受试者身上进行了物体抓握任务测试。结果表明,所开发的方法能够准确检测手部运动,并根据任务要求提供辅助。