Xiao Zhen Gang, Menon Carlo
Simon Fraser University, Burnaby, BC, Canada.
Schools of Mechatronics Systems Engineering and Engineering Science, Simon Fraser University, Surrey, BC, Canada.
JMIR Rehabil Assist Technol. 2017 May 16;4(1):e5. doi: 10.2196/rehab.6901.
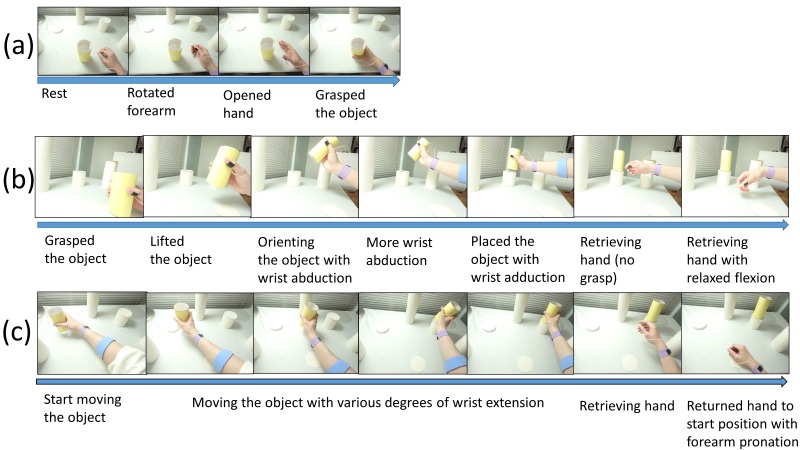
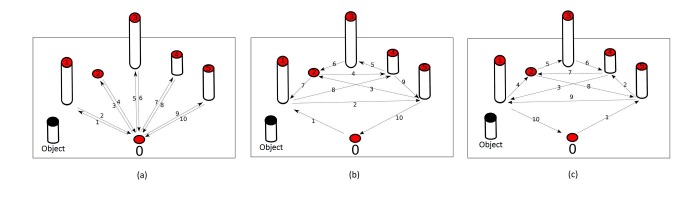
Functional arm movements generally require grasping an object. The possibility of detecting and counting the action of grasping is believed to be of importance for individual with motor function deficits of the arm, as it could be an indication of the number of the functional arm movements performed by the individuals during rehabilitation. In this exploratory work, the feasibility of using armbands recording radial displacements of forearm muscles and tendons (ie, force myography, FMG) to estimate hand grasping with healthy individuals was investigated. In contrast to previous studies, this exploratory study investigates the feasibility of (1) detecting grasping when the participants move their arms, which could introduce large artifacts to the point of potentially preventing the practical use of the proposed technology, and (2) counting grasping during arm-reaching tasks.
The aim of this study was to determine the usefulness of FMG in the detection of functional arm movements. The use of FMG straps placed on the forearm is proposed for counting the number of grasping actions in the presence of arm movements.
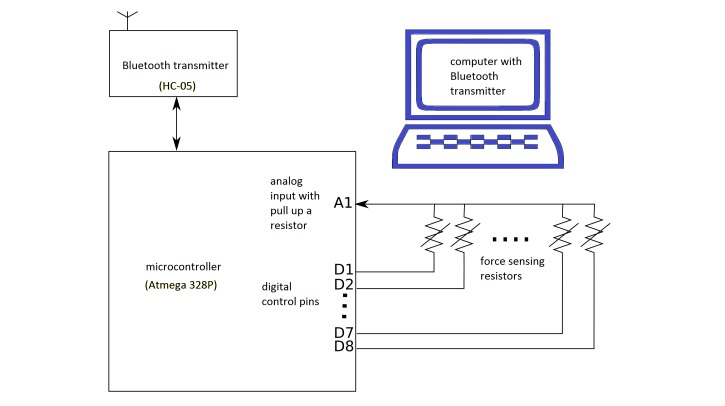
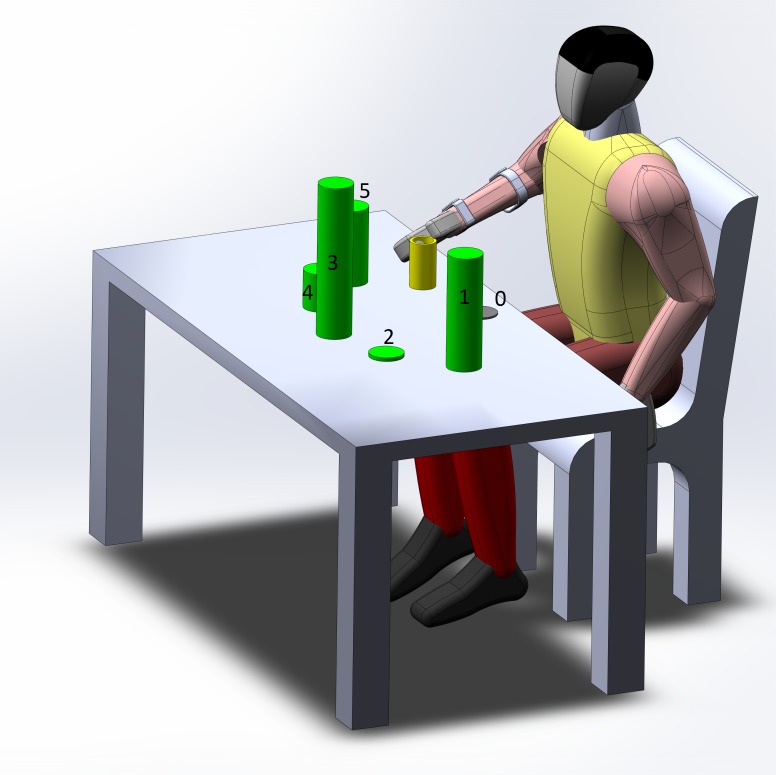
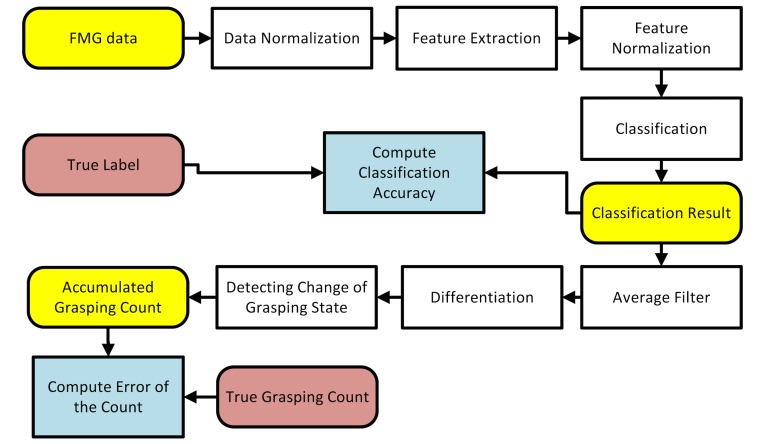
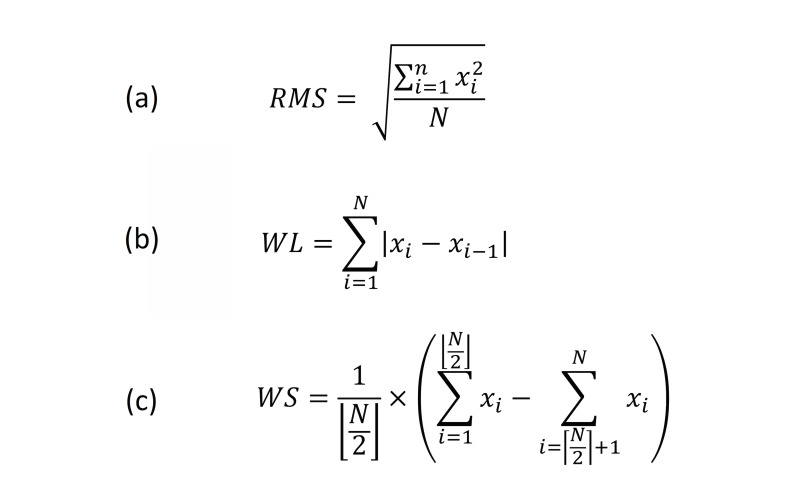
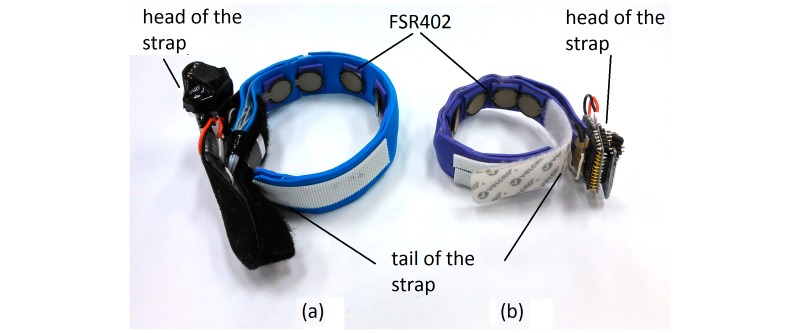
Ten healthy volunteers participated in this study to perform a pick-and-place exercise after providing informed consent. FMG signals were simultaneously collected using 2 FMG straps worn on their wrist and at the midposition of their forearm, respectively. Raw FMG signals and 3 additional FMG features (ie, root mean square, wavelength, and window symmetry) were extracted and fed into a linear discriminant analysis classifier to predict grasping states. The transition from nongrasping to grasping states was detected during the process of counting the number of grasping actions.
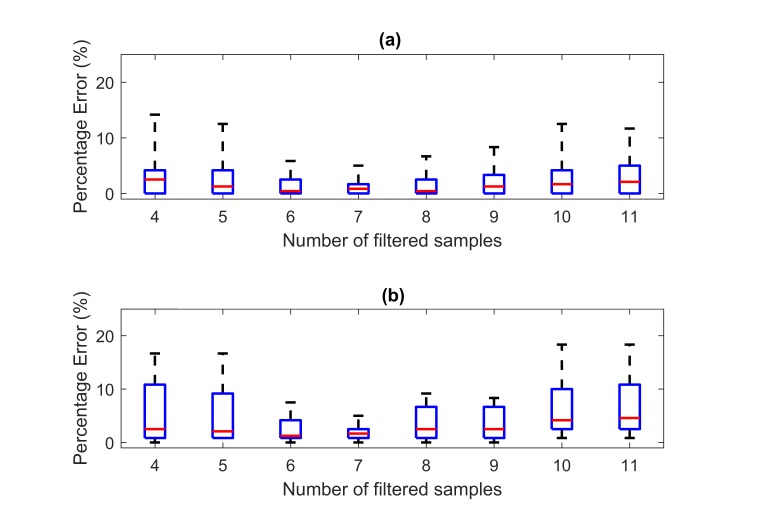
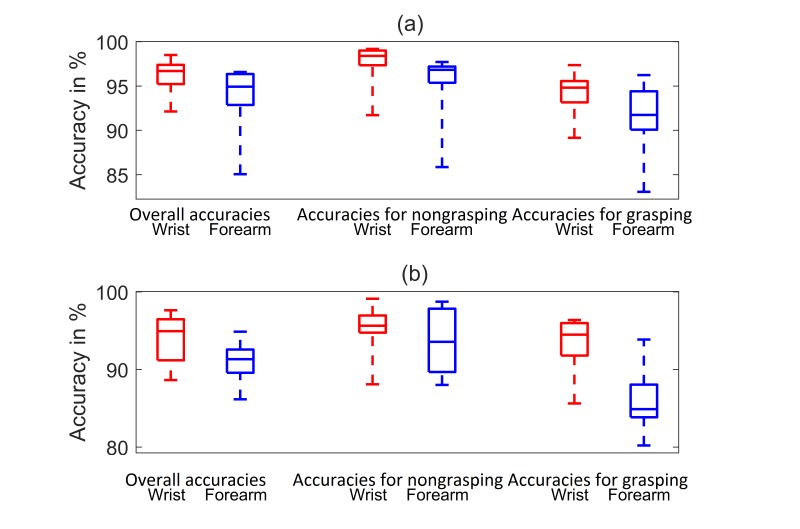
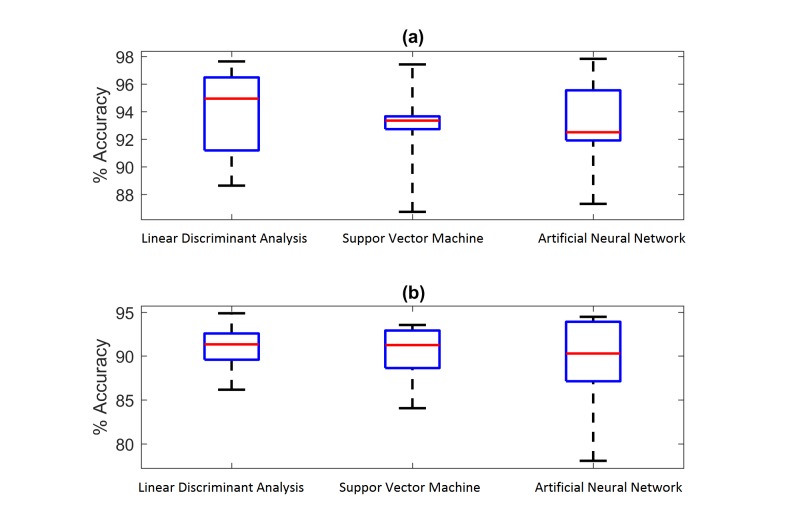
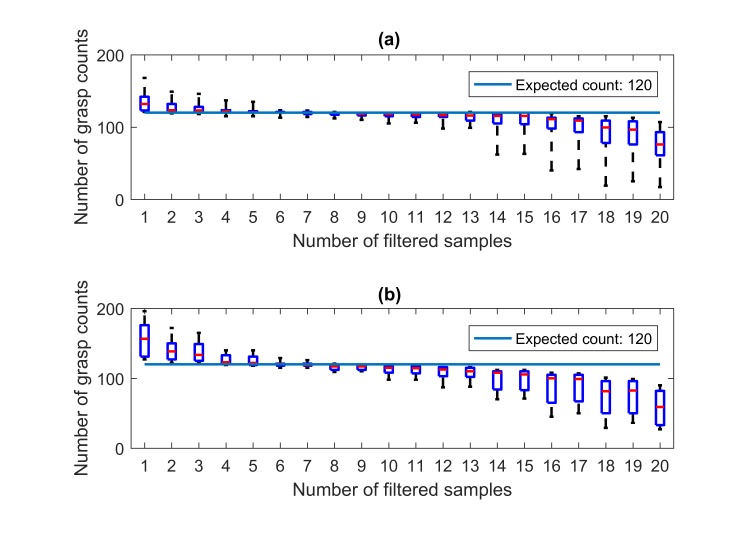
The median accuracy for detecting grasping events using FMG recorded from the wrist was 95%, and the corresponding interquartile range (IQR) was 5%. For forearm FMG classification, the median accuracy was 92%, and the corresponding IQR was 3%. The difference between the 2 median accuracies was statistically significant (P<.001) when using a paired 2-tailed sign test. The median percentage error for counting grasping events when FMG was recorded from the wrist was 1%, and the corresponding IQR was 2%. The median percentage error for FMG recorded from the forearm was 2%, and the corresponding IQR was also 2%. While the median percentage error for the wrist was lower than that of the forearm, the difference between the 2 was not statistically significant based on a paired 2-tailed sign test (P=.29).
This study reports that grasping can reliably be counted using an unobtrusive and simple FMG strap even in the presence of arm movements. Such a result supports the foundation for future research evaluating the feasibility of monitoring hand grasping during unsupervised ADL, leading to further investigations with individuals with motor function deficits of the arm.
功能性手臂运动通常需要抓取物体。对于存在手臂运动功能缺陷的个体而言,检测并计数抓取动作的可能性被认为具有重要意义,因为这可能表明个体在康复过程中执行的功能性手臂运动的次数。在这项探索性研究中,我们调查了使用记录前臂肌肉和肌腱径向位移的臂带(即测力肌电图,FMG)来估计健康个体手部抓握情况的可行性。与以往研究不同的是,这项探索性研究调查了以下两种情况的可行性:(1)在参与者移动手臂时检测抓握动作,这可能会引入大量伪迹,甚至可能阻碍所提出技术的实际应用;(2)在手臂伸展任务中计数抓握动作。
本研究的目的是确定FMG在检测功能性手臂运动方面的实用性。建议使用放置在前臂上的FMG带,以在存在手臂运动的情况下计数抓握动作的次数。
10名健康志愿者在签署知情同意书后参与了本研究,进行了取放练习。分别使用佩戴在他们手腕和前臂中部的2条FMG带同时采集FMG信号。提取原始FMG信号和另外3个FMG特征(即均方根、波长和窗口对称性),并将其输入线性判别分析分类器以预测抓握状态。在计数抓握动作次数的过程中检测从非抓握状态到抓握状态的转变。
使用从手腕记录的FMG检测抓握事件的中位准确率为95%,相应的四分位间距(IQR)为5%。对于前臂FMG分类,中位准确率为92%,相应IQR为3%。使用配对双尾符号检验时,这两个中位准确率之间的差异具有统计学意义(P<0.001)。当从手腕记录FMG时,计数抓握事件的中位百分比误差为1%,相应IQR为2%。从前臂记录的FMG的中位百分比误差为2%,相应IQR也为2%。虽然手腕的中位百分比误差低于前臂,但根据配对双尾符号检验,两者之间的差异无统计学意义(P=0.29)。
本研究报告称,即使在存在手臂运动的情况下,使用不显眼且简单的FMG带也能可靠地计数抓握动作。这一结果为未来评估在无监督日常生活活动中监测手部抓握可行性的研究奠定了基础,从而可对存在手臂运动功能缺陷的个体进行进一步研究。