Institute for Modelling and Simulation of Biomechanical Systems, Computational Biophysics and Biorobotics, University of Stuttgart, Nobelstraße 15, 70569, Stuttgart, Germany.
Center of Neurology, Hertie Institute for Clinical Brain Research, Otfried-Müller-Strasse 25, 72076, Tübingen, Germany.
Biol Cybern. 2021 Feb;115(1):7-37. doi: 10.1007/s00422-020-00856-4. Epub 2021 Feb 15.
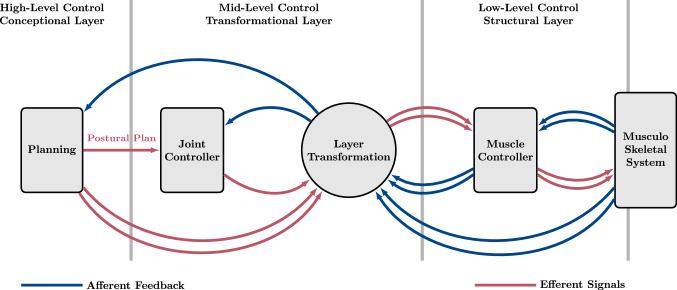
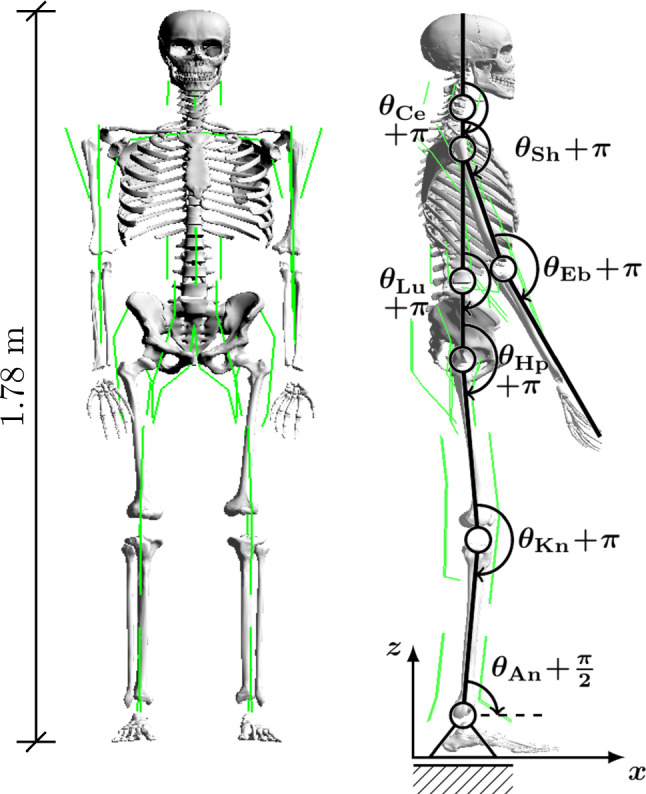
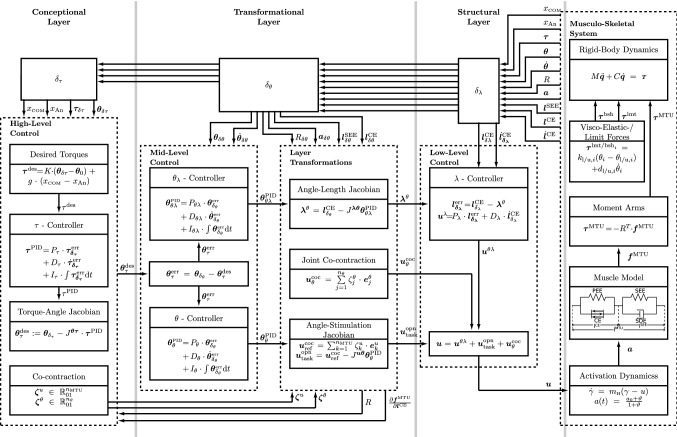
A key problem for biological motor control is to establish a link between an idea of a movement and the generation of a set of muscle-stimulating signals that lead to the movement execution. The number of signals to generate is thereby larger than the body's mechanical degrees of freedom in which the idea of the movement may be easily expressed, as the movement is actually executed in this space. A mathematical formulation that provides a solving link is presented in this paper in the form of a layered, hierarchical control architecture. It is meant to synthesise a wide range of complex three-dimensional muscle-driven movements. The control architecture consists of a 'conceptional layer', where the movement is planned, a 'structural layer', where the muscles are stimulated, and between both an additional 'transformational layer', where the muscle-joint redundancy is resolved. We demonstrate the operativeness by simulating human stance and squatting in a three-dimensional digital human model (DHM). The DHM considers 20 angular DoFs and 36 Hill-type muscle-tendon units (MTUs) and is exposed to gravity, while its feet contact the ground via reversible stick-slip interactions. The control architecture continuously stimulates all MTUs ('structural layer') based on a high-level, torque-based task formulation within its 'conceptional layer'. Desired states of joint angles (postural plan) are fed to two mid-level joint controllers in the 'transformational layer'. The 'transformational layer' communicates with the biophysical structures in the 'structural layer' by providing direct MTU stimulation contributions and further input signals for low-level MTU controllers. Thereby, the redundancy of the MTU stimulations with respect to the joint angles is resolved, i.e. a link between plan and execution is established, by exploiting some properties of the biophysical structures modelled. The resulting joint torques generated by the MTUs via their moment arms are fed back to the conceptional layer, closing the high-level control loop. Within our mathematical formulations of the Jacobian matrix-based layer transformations, we identify the crucial information for the redundancy solution to be the muscle moment arms, the stiffness relations of muscle and tendon tissue within the muscle model, and the length-stimulation relation of the muscle activation dynamics. The present control architecture allows the straightforward feeding of conceptional movement task formulations to MTUs. With this approach, the problem of movement planning is eased, as solely the mechanical system has to be considered in the conceptional plan.
生物运动控制的一个关键问题是建立运动意图和产生一组肌肉刺激信号之间的联系,这些信号会导致运动的执行。生成的信号数量大于身体在机械自由度中的数量,而运动意图可以很容易地在这个空间中表达。本文提出了一种数学公式,以分层、层次控制架构的形式提供了解决方案。它旨在综合多种复杂的三维肌肉驱动运动。控制架构由一个“概念层”组成,在这个层中规划运动;一个“结构层”,在这个层中刺激肌肉;以及在两者之间的一个额外的“转换层”,在这个层中解决肌肉关节冗余问题。我们通过在一个三维数字人体模型 (DHM) 中模拟人体站立和下蹲来演示其有效性。DHM 考虑了 20 个角度自由度和 36 个 Hill 型肌肉肌腱单元 (MTU),并受到重力的影响,同时其脚通过可逆的粘滑相互作用与地面接触。控制架构基于其“概念层”中的基于扭矩的高级任务公式,连续刺激所有 MTU(“结构层”)。关节角度的期望状态(姿势计划)被馈送到“转换层”中的两个中级关节控制器。“转换层”通过为低级 MTU 控制器提供直接的 MTU 刺激贡献和进一步的输入信号与“结构层”中的生物物理结构进行通信。因此,通过利用建模的生物物理结构的一些特性,解决了 MTU 刺激相对于关节角度的冗余问题,即建立了计划和执行之间的联系。由 MTU 通过其力臂产生的生成的关节扭矩被反馈到概念层,从而闭合了高级控制回路。在我们基于雅可比矩阵的层变换的数学公式中,我们确定了解决冗余问题的关键信息是肌肉力臂、肌肉模型中肌肉和肌腱组织的刚度关系,以及肌肉激活动力学的长度刺激关系。当前的控制架构允许直接向 MTU 提供概念运动任务公式。通过这种方法,运动规划的问题得到了缓解,因为在概念计划中只需要考虑机械系统。