Olsen A M, Hernandez L P, Brainerd E L
Department of Ecology and Evolutionary Biology, Brown University, 171 Meeting St, Box G-B 204, Providence, RI 02912, USA.
Department of Biological Sciences, Science and Engineering Hall, The George Washington University, 800 22nd Street NW, Suite 6000, Washington, DC 20052, USA.
Integr Org Biol. 2020 Nov 10;2(1):obaa031. doi: 10.1093/iob/obaa031. eCollection 2020.
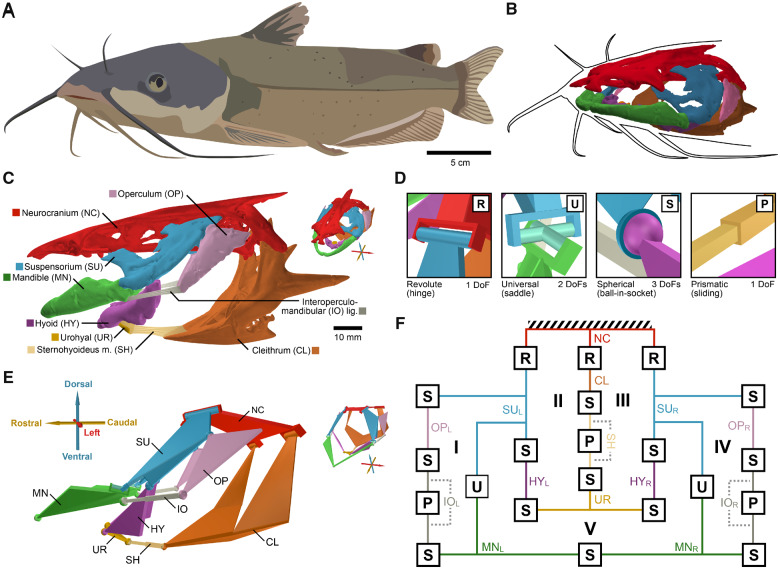
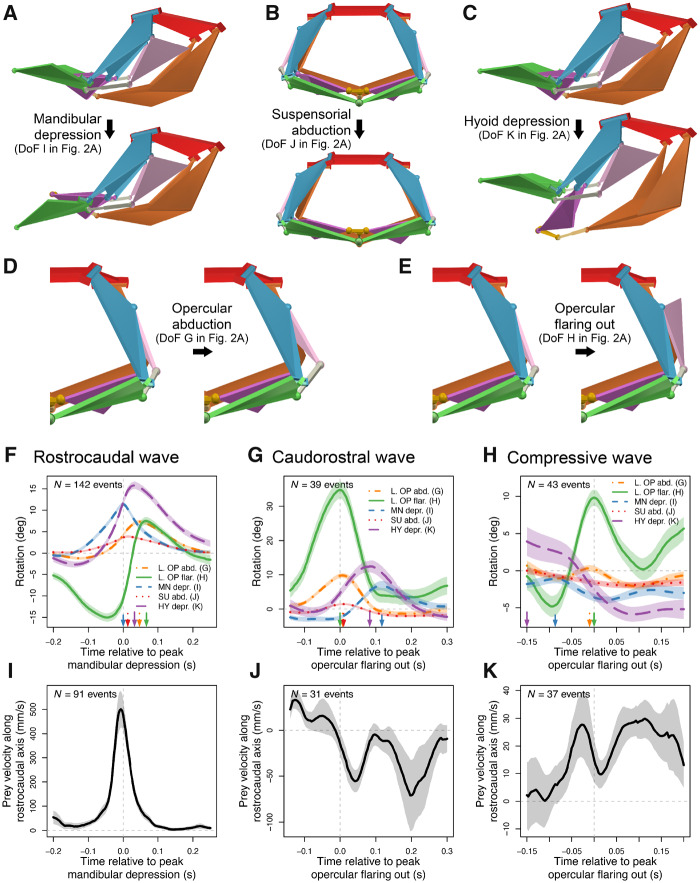
Fish perform many complex manipulation behaviors without hands or flexible muscular tongues, instead relying on more than 20 movable skeletal elements in their highly kinetic skulls. How fish use their skulls to accomplish these behaviors, however, remains unclear. Most previous mechanical models have represented the fish skull using one or more planar four-bar linkages, which have just a single degree of freedom (DoF). In contrast, truncated-cone hydrodynamic models have assumed up to five DoFs. In this study, we introduce and validate a 3D mechanical linkage model of a fish skull that incorporates the pectoral girdle and mandibular and hyoid arches. We validate this model using an motion dataset of suction feeding in channel catfish and then use this model to quantify the DoFs in the fish skull, to categorize the motion patterns of the cranial linkage during feeding, and to evaluate the association between these patterns and food motion. We find that the channel catfish skull functions as a 17-link, five-loop parallel mechanism. Despite having 19 potential DoFs, we find that seven DoFs are sufficient to describe most of the motion of the cranial linkage, consistent with the fish skull functioning as a multi-DoF, manipulation system. Channel catfish use this linkage to generate three different motion patterns (rostrocaudal wave, caudorostral wave, and compressive wave), each with its own associated food velocity profile. These results suggest that biomechanical manipulation systems must have a minimum number of DoFs to effectively control objects, whether in water or air.
鱼类在没有手或灵活的肌肉舌头的情况下能执行许多复杂的操作行为,而是依靠其高度灵活的头骨中20多个可移动的骨骼元素。然而,鱼类如何利用其头骨完成这些行为仍不清楚。以前的大多数力学模型都用一个或多个平面四杆连杆机构来表示鱼头骨,这些机构只有一个自由度(DoF)。相比之下,截头圆锥体水动力模型假设最多有五个自由度。在本研究中,我们引入并验证了一个包含胸带以及下颌和舌弓的鱼头骨三维机械连杆模型。我们使用斑点叉尾鮰的吸食摄食运动数据集来验证该模型,然后用这个模型来量化鱼头骨的自由度,对摄食过程中颅骨连杆的运动模式进行分类,并评估这些模式与食物运动之间的关联。我们发现斑点叉尾鮰的头骨起到了一个由17个连杆、五个回路的并联机构的作用。尽管有19个潜在的自由度,但我们发现七个自由度足以描述颅骨连杆的大部分运动,这与鱼头骨作为一个多自由度操纵系统的功能一致。斑点叉尾鮰利用这个连杆机构产生三种不同的运动模式(头-尾波、尾-头波和压缩波),每种模式都有其相关的食物速度分布。这些结果表明,生物力学操纵系统必须有最少数量的自由度才能有效地控制物体,无论是在水中还是在空气中。