College of Information Science and Engineering, Northeastern University, Shenyang 110819, China.
Faculty of Robot Science and Engineering, Northeastern University, Shenyang 110169, China.
Sensors (Basel). 2021 Mar 18;21(6):2132. doi: 10.3390/s21062132.
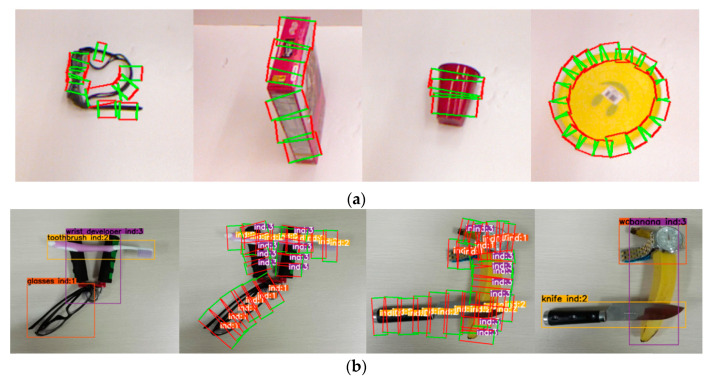
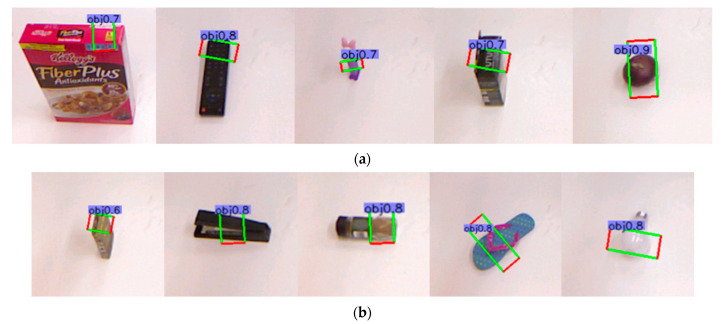
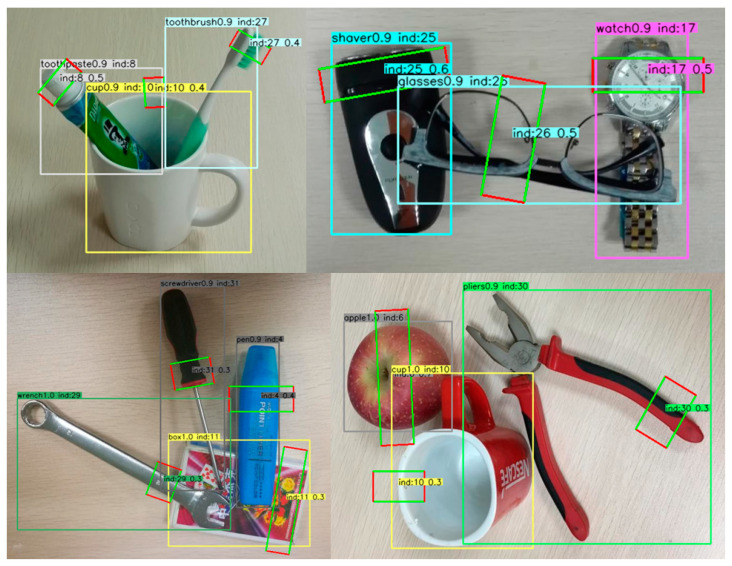
Robot grasping is an important direction in intelligent robots. However, how to help robots grasp specific objects in multi-object scenes is still a challenging problem. In recent years, due to the powerful feature extraction capabilities of convolutional neural networks (CNN), various algorithms based on convolutional neural networks have been proposed to solve the problem of grasp detection. Different from anchor-based grasp detection algorithms, in this paper, we propose a keypoint-based scheme to solve this problem. We model an object or a grasp as a single point-the center point of its bounding box. The detector uses keypoint estimation to find the center point and regress to all other object attributes such as size, direction, etc. Experimental results demonstrate that the accuracy of this method is 74.3% in the multi-object grasp dataset VMRD, and the performance on the single-object scene Cornell dataset is competitive with the current state-of-the-art grasp detection algorithm. Robot experiments demonstrate that this method can help robots grasp the target in single-object and multi-object scenes with overall success rates of 94% and 87%, respectively.
机器人抓取是智能机器人的一个重要方向。然而,如何帮助机器人在多目标场景中抓取特定的物体仍然是一个具有挑战性的问题。近年来,由于卷积神经网络(CNN)强大的特征提取能力,已经提出了各种基于卷积神经网络的算法来解决抓取检测问题。与基于锚点的抓取检测算法不同,在本文中,我们提出了一种基于关键点的方案来解决这个问题。我们将一个物体或抓取表示为一个单点——其边界框的中心点。检测器使用关键点估计来找到中心点,并回归所有其他物体属性,如图像大小、方向等。实验结果表明,该方法在多物体抓取数据集 VMRD 上的准确率为 74.3%,在单物体场景 Cornell 数据集上的性能与当前最先进的抓取检测算法相当。机器人实验表明,该方法可以帮助机器人在单目标和多目标场景中抓取目标,总体成功率分别为 94%和 87%。