Ji Shan-Qian, Huang Ming-Bao, Huang Han-Pang
Robotics Laboratory, Department of Mechanical Engineering, National Taiwan University, Taipei 10617, Taiwan.
Sensors (Basel). 2019 Apr 2;19(7):1595. doi: 10.3390/s19071595.
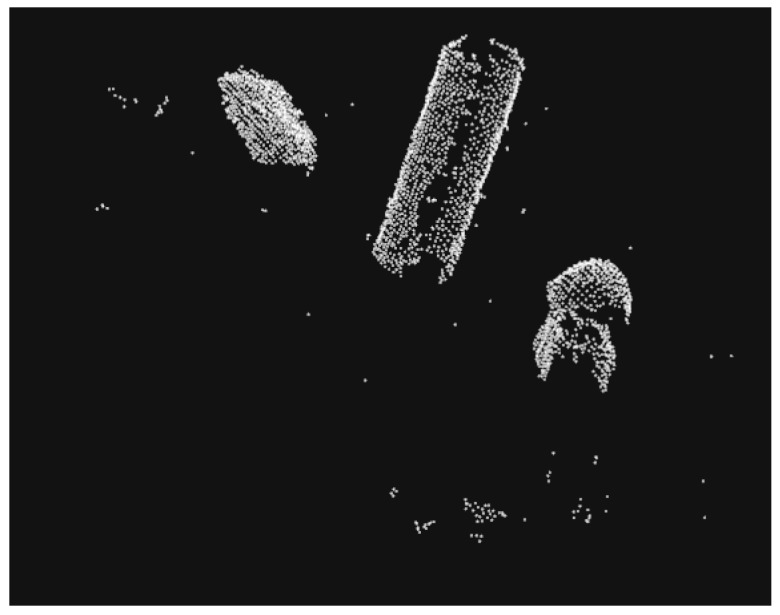
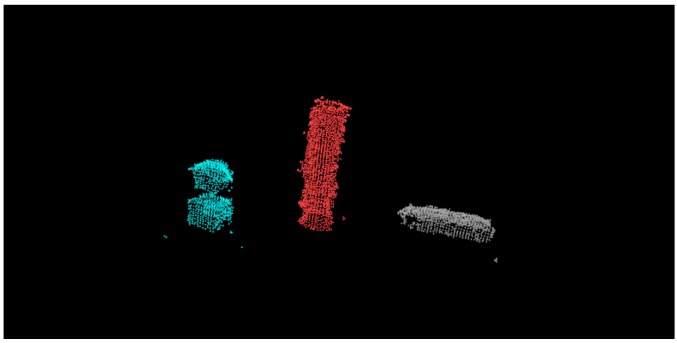
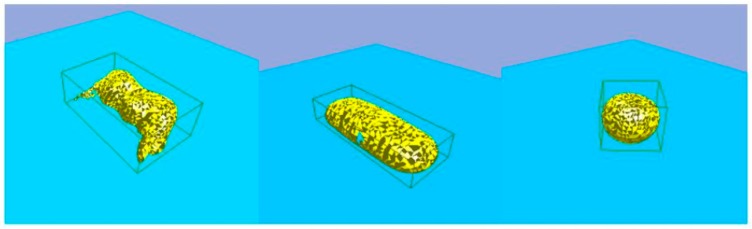
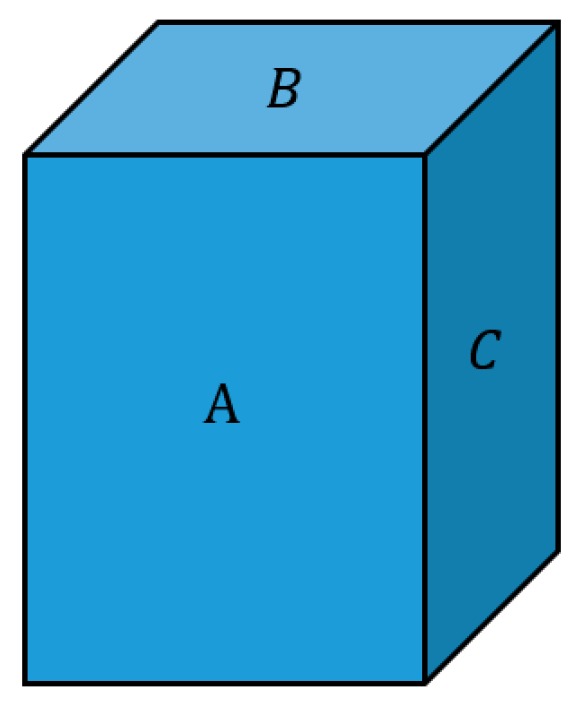
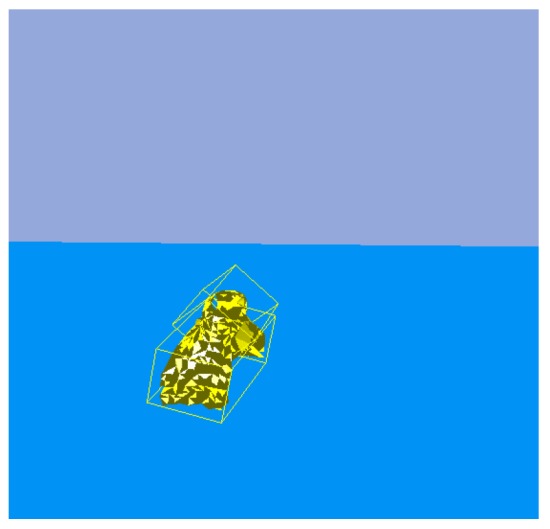
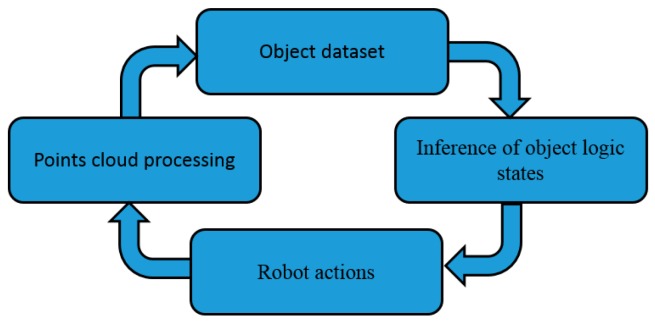
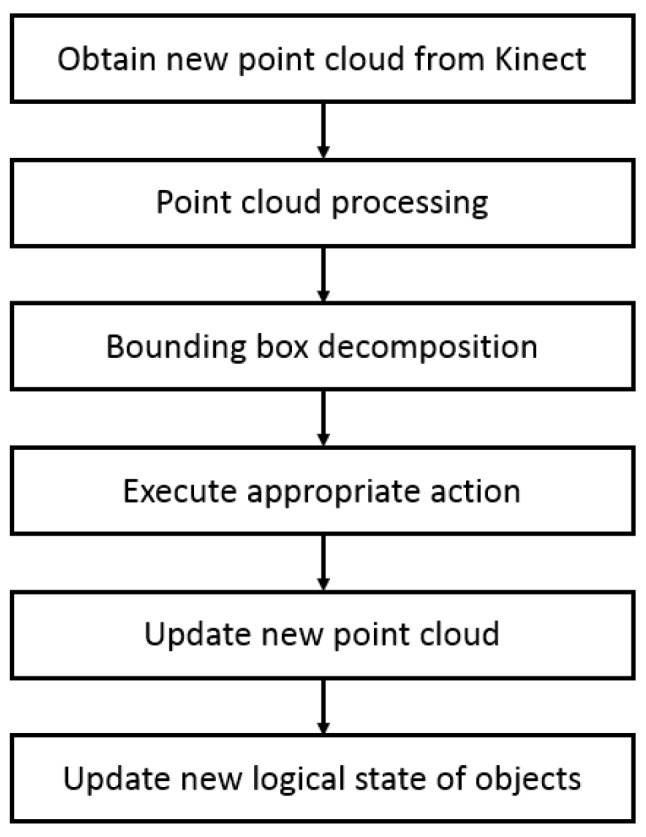
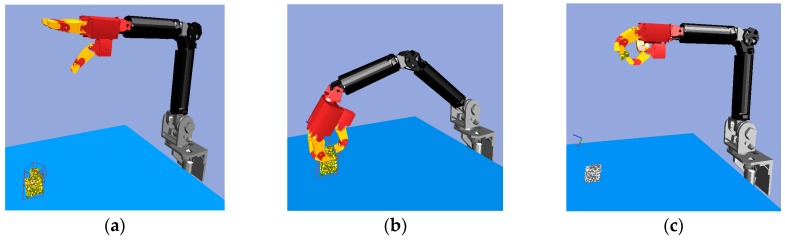
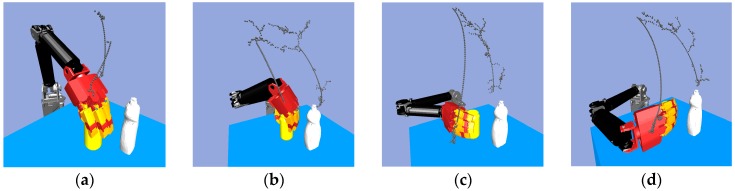
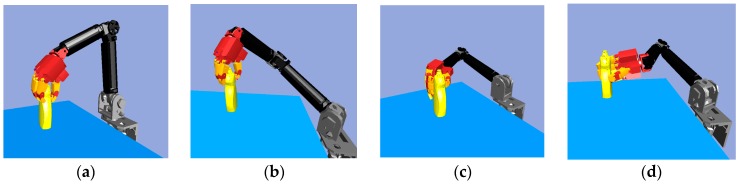
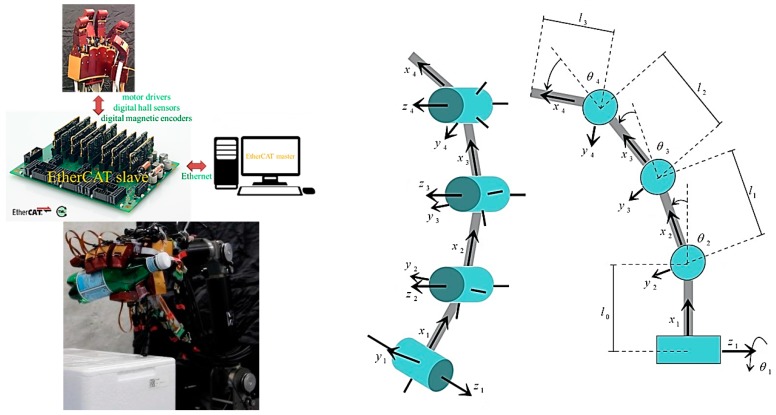
Robots frequently need to work in human environments and handle many different types of objects. There are two problems that make this challenging for robots: human environments are typically cluttered, and the multi-finger robot hand needs to grasp and to lift objects without knowing their mass and damping properties. Therefore, this study combined vision and robot hand real-time grasp control action to achieve reliable and accurate object grasping in a cluttered scene. An efficient online algorithm for collision-free grasping pose generation according to a bounding box is proposed, and the grasp pose will be further checked for grasp quality. Finally, by fusing all available sensor data appropriately, an intelligent real-time grasp system was achieved that is reliable enough to handle various objects with unknown weights, friction, and stiffness. The robots used in this paper are the NTU 21-DOF five-finger robot hand and the NTU 6-DOF robot arm, which are both constructed by our Lab.
机器人经常需要在人类环境中工作并处理许多不同类型的物体。有两个问题使得这对机器人来说具有挑战性:人类环境通常杂乱无章,并且多指机器人手需要在不知道物体质量和阻尼特性的情况下抓取和举起物体。因此,本研究将视觉与机器人手实时抓取控制动作相结合,以在杂乱场景中实现可靠且准确的物体抓取。提出了一种根据边界框生成无碰撞抓取姿态的高效在线算法,并将进一步检查抓取姿态的抓取质量。最后,通过适当地融合所有可用的传感器数据,实现了一个智能实时抓取系统,该系统足够可靠,能够处理具有未知重量、摩擦力和刚度的各种物体。本文中使用的机器人是由我们实验室构建的NTU 21自由度五指机器人手和NTU 6自由度机器人手臂。