Robotics & Multibody Mechanics Research Group, Department of Mechanical Engineering, Vrije Universiteit Brussel, 1050 Elsene, Belgium.
imec, 3001 Leuven, Belgium.
Sensors (Basel). 2021 Mar 19;21(6):2157. doi: 10.3390/s21062157.
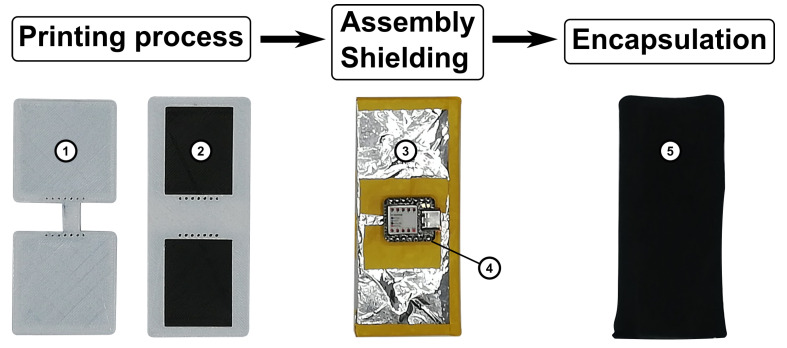
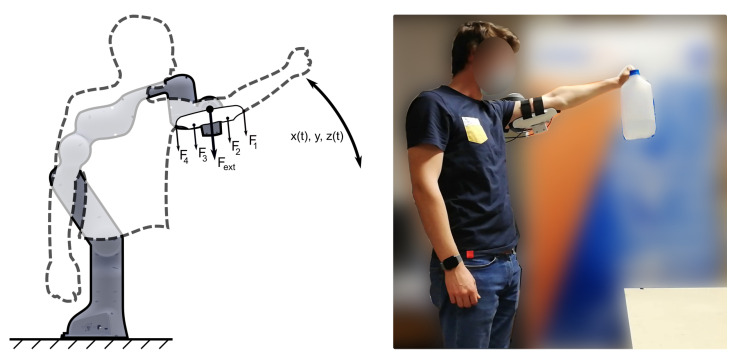
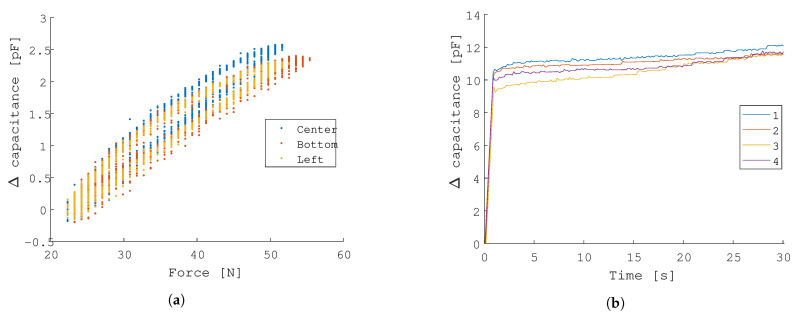
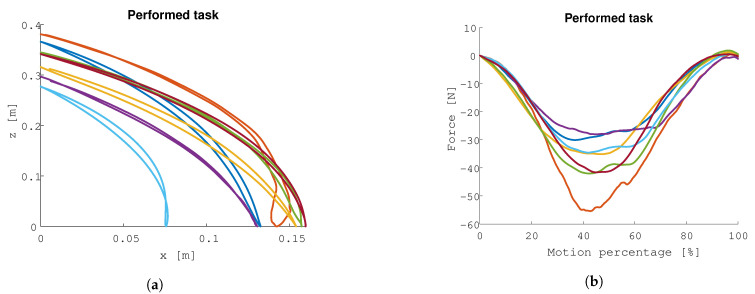
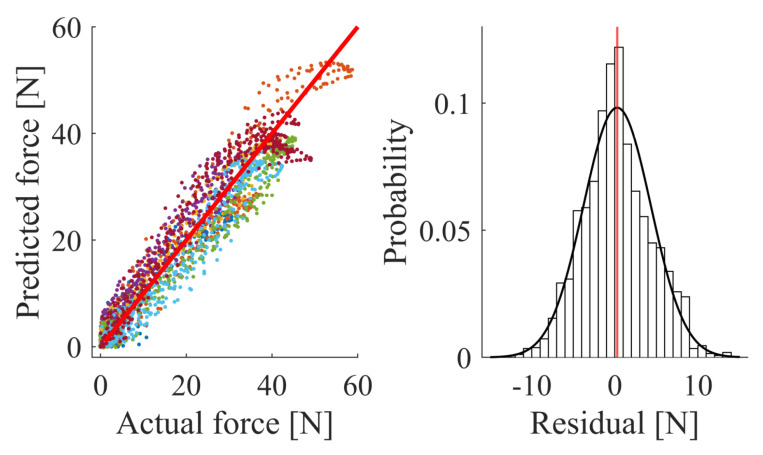
Sensing pressure at the physical interface between the robot and the human has important implications for wearable robots. On the one hand, monitoring pressure distribution can give valuable benefits on the aspects of comfortability and safety of such devices. Additionally, on the other hand, they can be used as a rich sensory input to high level interaction controllers. However, a problem is that the commercial availability of this technology is mostly limited to either low-cost solutions with poor performance or expensive options, limiting the possibilities for iterative designs. As an alternative, in this manuscript we present a three-dimensional (3D) printed flexible capacitive pressure sensor that allows seamless integration for wearable robotic applications. The sensors are manufactured using additive manufacturing techniques, which provides benefits in terms of versatility of design and implementation. In this study, a characterization of the 3D printed sensors in a test-bench is presented after which the sensors are integrated in an upper arm interface. A human-in-the-loop calibration of the sensors is then shown, allowing to estimate the external force and pressure distribution that is acting on the upper arm of seven human subjects while performing a dynamic task. The validation of the method is achieved by means of a collaborative robot for precise force interaction measurements. The results indicate that the proposed sensors are a potential solution for further implementation in human-robot interfaces.
在机器人和人体的物理接口处感知压力对于可穿戴机器人具有重要意义。一方面,监测压力分布可以在这些设备的舒适性和安全性方面带来有价值的好处。此外,另一方面,它们可以作为高级交互控制器的丰富感觉输入。然而,问题是这项技术的商业可用性主要局限于性能较差的低成本解决方案或昂贵的选择,这限制了迭代设计的可能性。作为替代方案,在本文中,我们提出了一种三维(3D)打印的柔性电容压力传感器,它可以为可穿戴机器人应用提供无缝集成。传感器采用增材制造技术制造,这在设计和实施的通用性方面提供了优势。在本研究中,在测试台上对 3D 打印传感器进行了特性描述,然后将传感器集成在上臂接口中。然后展示了传感器的人机交互校准,允许在七个人类受试者执行动态任务时估计作用在上臂上的外力和压力分布。通过协作机器人进行精确的力交互测量来实现方法的验证。结果表明,所提出的传感器是在人机接口中进一步实施的潜在解决方案。