Institute for Medical Engineering and Medical Informatics, School of Life Sciences, University of Applied Sciences and Arts Northwestern Switzerland (FHNW), 4132 Muttenz, Switzerland.
Icube laboratory, UMR 7357 (University of Strasbourg/CNRS), 67412 Illkirch, France.
Sensors (Basel). 2021 Apr 10;21(8):2670. doi: 10.3390/s21082670.
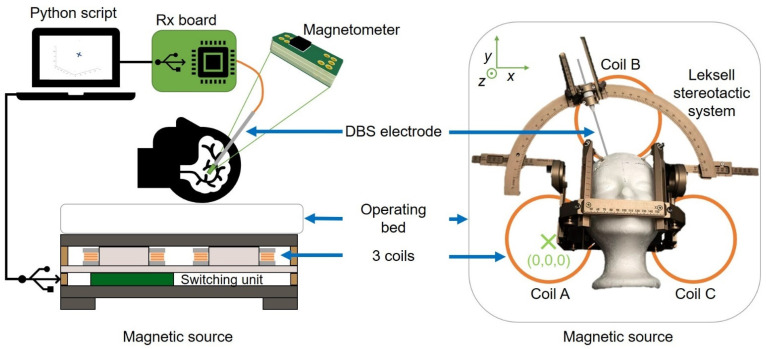
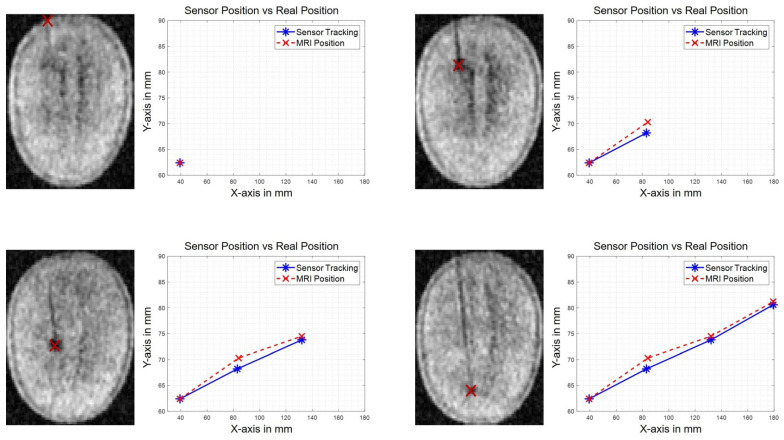
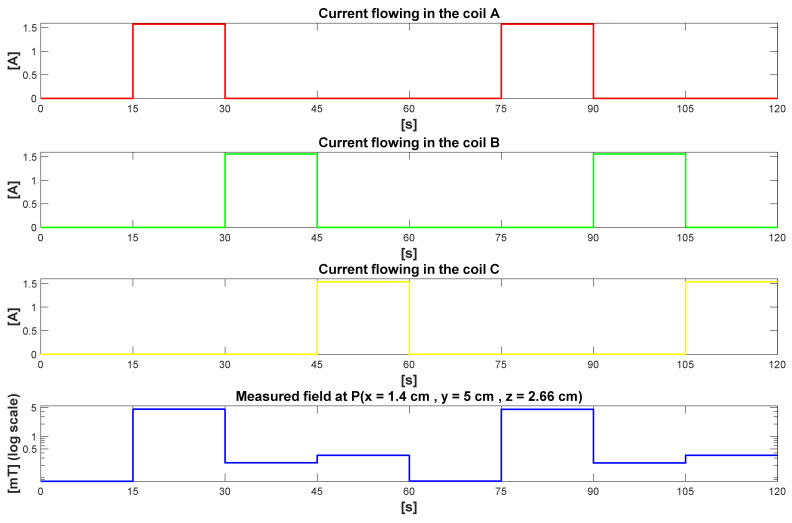
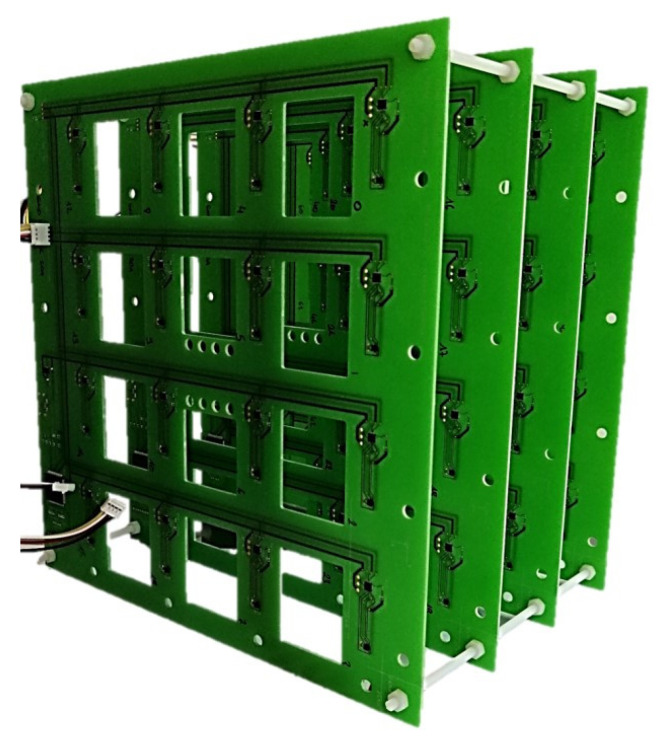
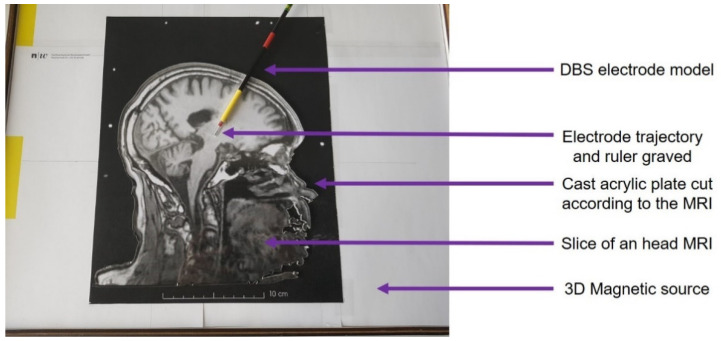
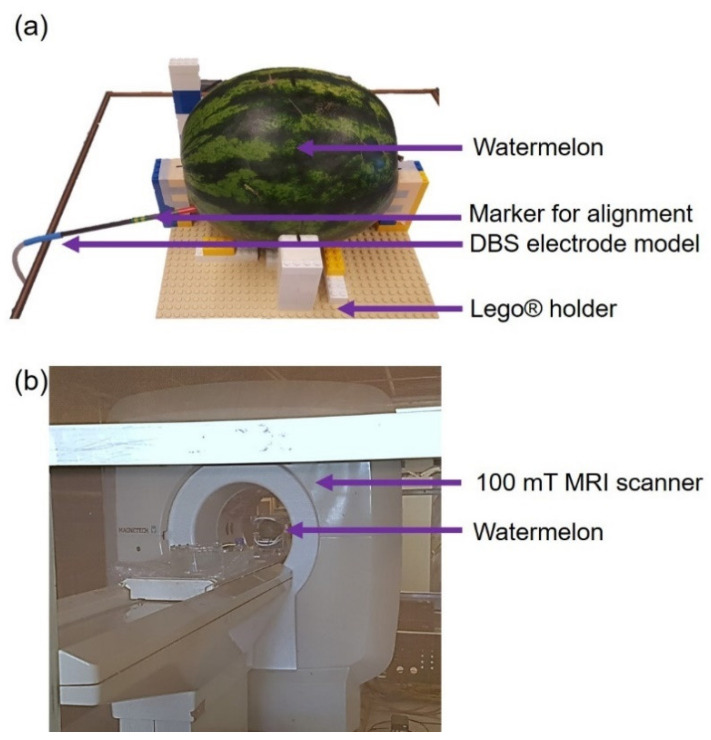
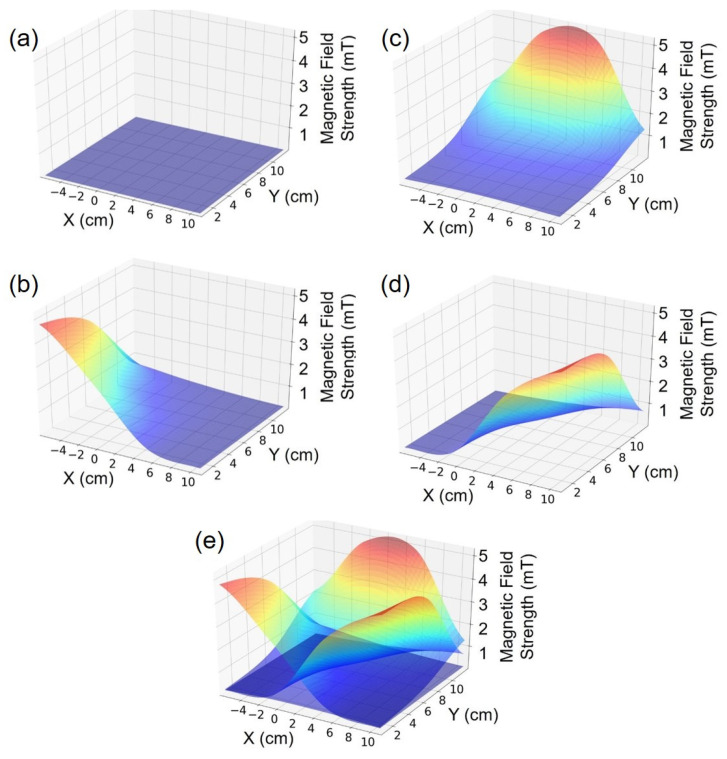
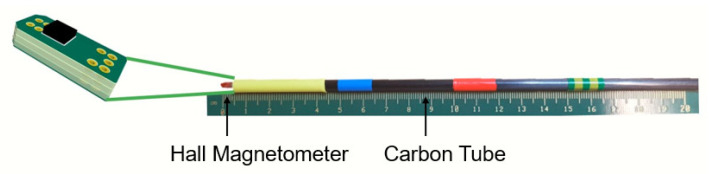
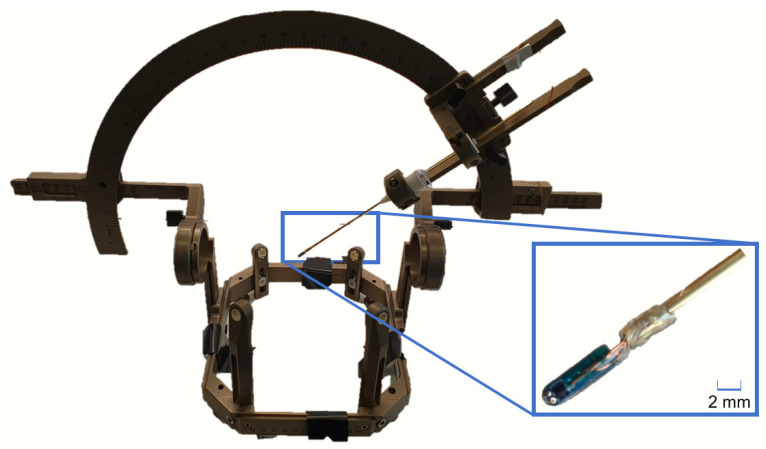
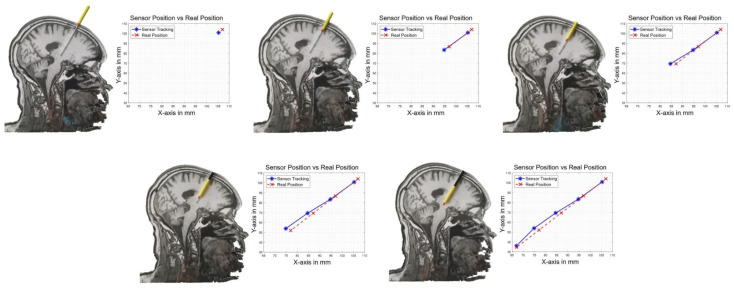
This paper presents a tracking system using magnetometers, possibly integrable in a deep brain stimulation (DBS) electrode. DBS is a treatment for movement disorders where the position of the implant is of prime importance. Positioning challenges during the surgery could be addressed thanks to a magnetic tracking. The system proposed in this paper, complementary to existing procedures, has been designed to bridge preoperative clinical imaging with DBS surgery, allowing the surgeon to increase his/her control on the implantation trajectory. Here the magnetic source required for tracking consists of three coils, and is experimentally mapped. This mapping has been performed with an in-house three-dimensional magnetic camera. The system demonstrates how magnetometers integrated directly at the tip of a DBS electrode, might improve treatment by monitoring the position during and after the surgery. The three-dimensional operation without line of sight has been demonstrated using a reference obtained with magnetic resonance imaging (MRI) of a simplified brain model. We observed experimentally a mean absolute error of 1.35 mm and an Euclidean error of 3.07 mm. Several areas of improvement to target errors below 1 mm are also discussed.
本文提出了一种使用磁力计的跟踪系统,该系统可能集成在深部脑刺激 (DBS) 电极中。DBS 是一种治疗运动障碍的方法,植入物的位置至关重要。由于磁跟踪,手术中的定位挑战可以得到解决。本文提出的系统是对现有程序的补充,旨在弥合术前临床成像与 DBS 手术之间的差距,使外科医生能够增加对植入轨迹的控制。这里跟踪所需的磁源由三个线圈组成,并进行了实验映射。该映射是使用内部的三维磁力计相机完成的。该系统展示了如何通过将磁力计直接集成到 DBS 电极的尖端,在手术期间和之后监测位置,从而可能改善治疗效果。已经使用简化脑模型的磁共振成像 (MRI) 获得的参考来演示无需视线的三维操作。我们实验观察到平均绝对误差为 1.35 毫米,欧几里得误差为 3.07 毫米。还讨论了一些改进目标误差低于 1 毫米的区域。