Shenzhen Institute of Advanced Technology, Chinese Academy of Sciences, 1068 Xueyuan Avenue, Shenzhen University Town, Shenzhen, GD, 518055, People's Republic of China.
University of Chinese Academy of Sciences, Beijing, People's Republic of China.
Int J Comput Assist Radiol Surg. 2021 Jun;16(6):1003-1014. doi: 10.1007/s11548-021-02380-7. Epub 2021 May 1.
Radioactive seed implantation is an effective invasive treatment method for malignant liver tumors in hepatocellular carcinomas. However, challenges of the manual procedure may degrade the efficacy of the technique, such as the high accuracy requirement and radiation exposure to the surgeons. This paper aims to develop a robotic system and its control methods for assisting surgeons on the treatment.
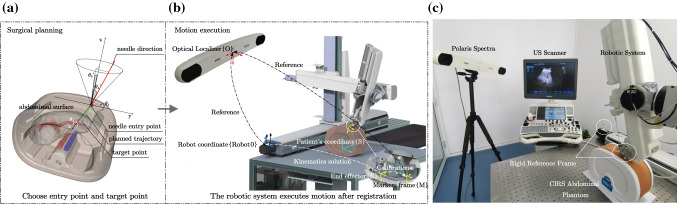
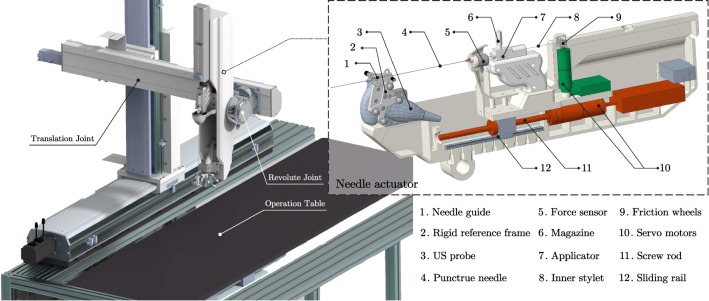
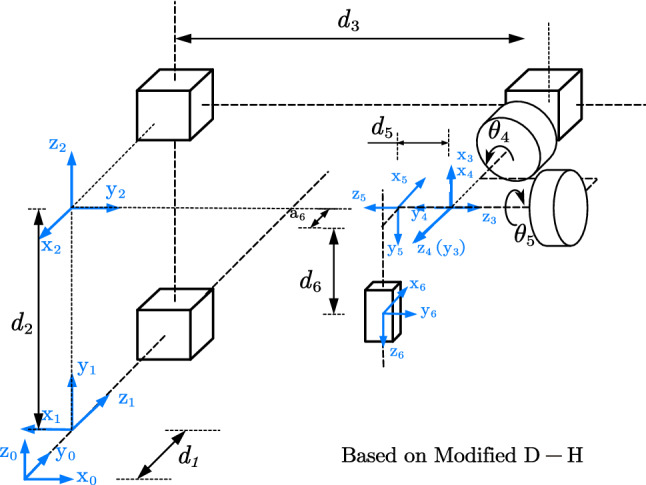
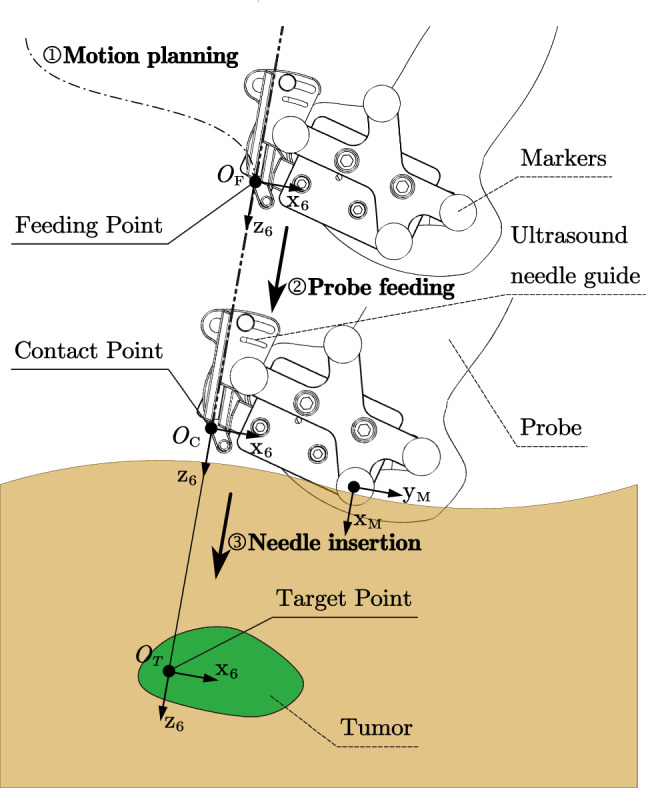
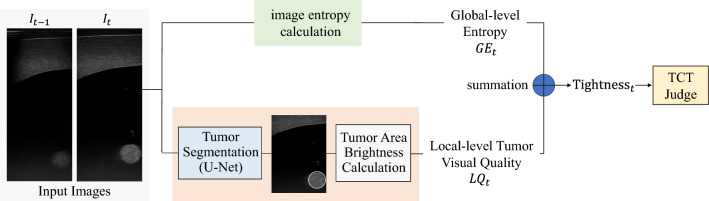
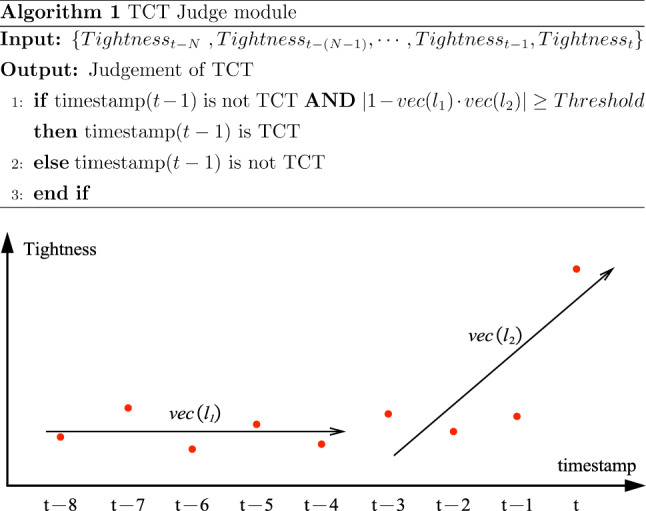
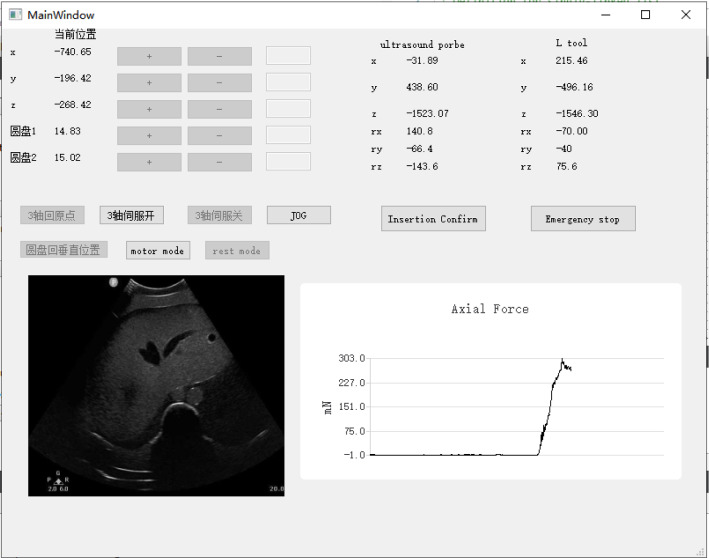
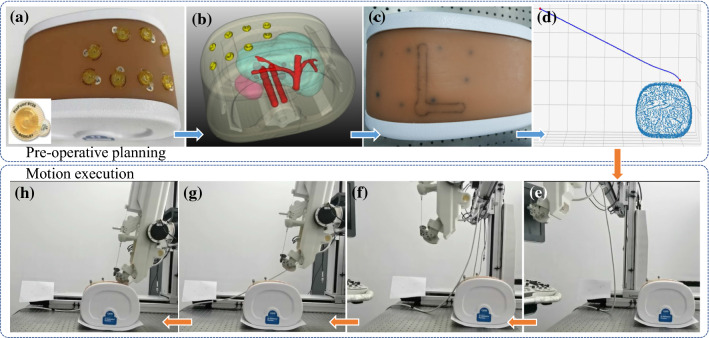
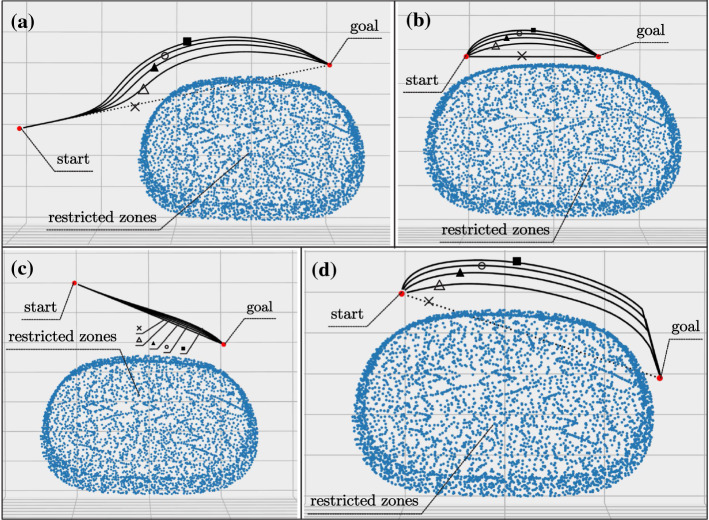
We present an interventional robotic system, which consists of a 5 Degree-of-Freedom (DoF) positioning robotic arm (a 3-DoF translational joint and a 2-DoF revolute joint) and a needle actuator used for needle insertion and radioactive seeds implantation. Control strategy is designed for the system to ensure the safety of the motion. In the designed framework, an artificial potential field (APF)-based motion planning and an ultrasound (US) image-based contacting methods are proposed for the control.
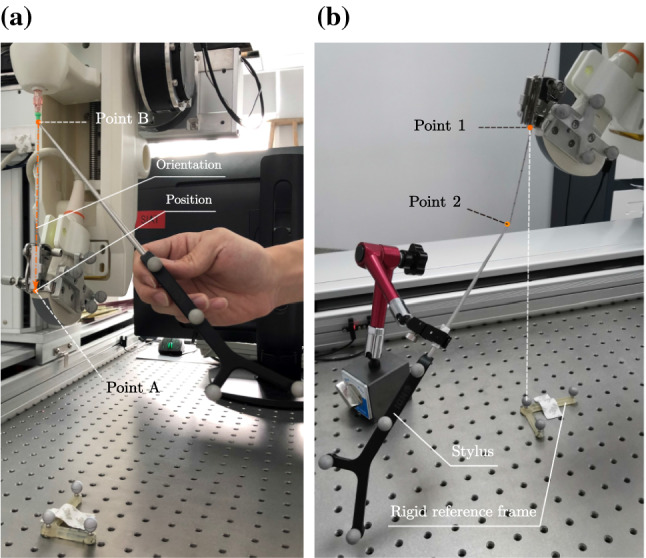
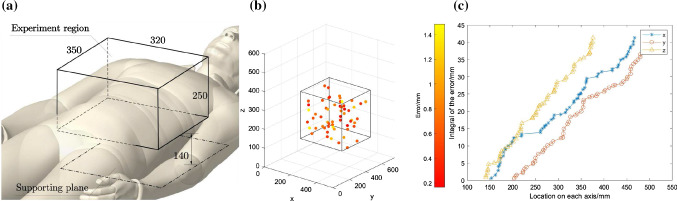
Experiments were performed to evaluate position and orientation accuracy as well as validate the motion planning procedure of the system. The mean and standard deviation of targeting error is 0.69 mm and 0.33 mm, respectively. Needle placement accuracy is 1.10 mm by mean. The feasibility of the control strategy, including path planning and the contacting methods, is demonstrated by simulation and experiments based on an abdominal phantom.
This paper presents a robotic system with force and US image feedback in assisting surgeons performing brachytherapy on liver tumors. The proposed robotic system is capable of executing an accurate needle insertion task with by optical tracking. The proposed methods improve the safety of the robot's motion and automate the process of US probe contacting under the feedback of US-image.
放射性粒子植入术是治疗肝细胞肝癌恶性肝肿瘤的一种有效侵袭性治疗方法。然而,手动操作的挑战可能会降低该技术的效果,例如对手术医生的高精度要求和辐射暴露。本文旨在开发一种机器人系统及其控制方法,以协助医生进行治疗。
我们提出了一种介入式机器人系统,它由 5 自由度(DoF)定位机器人手臂(一个 3-DOF 平移关节和一个 2-DOF 旋转关节)和一个用于针插入和放射性种子植入的针驱动器组成。为了确保运动的安全性,设计了控制策略。在设计的框架中,提出了基于人工势场(APF)的运动规划和基于超声(US)图像的接触方法用于控制。
进行了实验以评估位置和方向精度,并验证系统的运动规划过程。目标误差的平均值和标准差分别为 0.69mm 和 0.33mm。平均针放置精度为 1.10mm。通过模拟和基于腹部模拟体的实验验证了控制策略的可行性,包括路径规划和接触方法。
本文提出了一种带有力和 US 图像反馈的机器人系统,用于协助医生对肝肿瘤进行近距离放射治疗。所提出的机器人系统能够通过光学跟踪执行精确的针插入任务。所提出的方法提高了机器人运动的安全性,并在 US 图像反馈下自动执行 US 探头接触过程。