Zeng Shaohua, Zhou Yu, Wang Min, Bao Hui, Na Yanqun, Pan Tiejun
The First School of Clinical Medicine, Southern Medical University, Guangzhou, China.
Department of Urology, The Sixth Affiliated Hospital of Guangzhou Medical University, Qingyuan, China.
Transl Androl Urol. 2021 Aug;10(8):3386-3394. doi: 10.21037/tau-21-473.
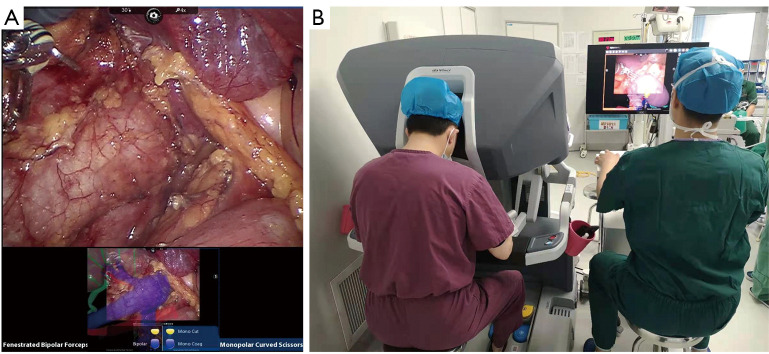
To explore the efficacy and advantages of real-time navigation using holographic reconstruction (HR) technology combined with da VinciTM robotic system for partial nephrectomy (PN) in patients with renal tumor.
The clinical data of 41 patients with totally intrarenal tumors receiving robot-assisted partial nephrectomy (RAPN) from April 2018 to October 2020 in our department were collected and retrospectively analyzed. All operations were performed by the same surgeon. HR technology and three-dimensional (3D) reconstruction techniques were applied for real-time navigation to resect tumors using the da VinciTM robotic system. The relevant clinical parameters and surgical outcomes of the patients were recorded and analyzed.
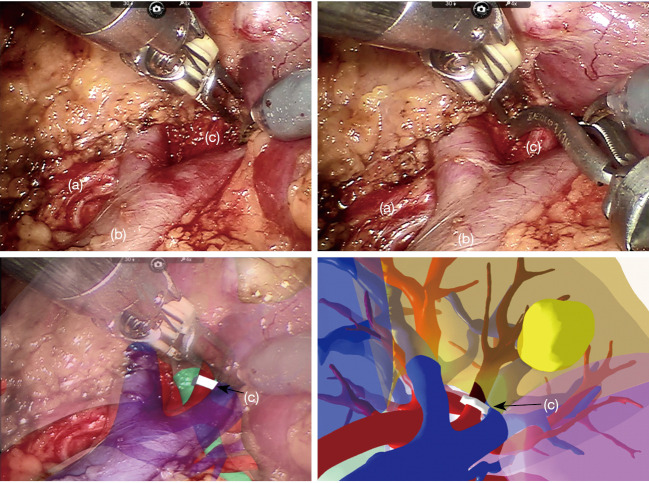
HR technology allowed accurate evaluation of tumors, renal hilus vessels, and surrounding organs during the operation. With real-time navigation HR, all cases were performed by RAPN. The mean operative time was 115.3±20.3 (range, 70-153) minutes, and the warm ischemia time (WIT) was 18.7±3.9 (range, 13-28) minutes. The estimated blood loss (EBL) was 98.8±18.7 (range, 60-141) mL. Negative surgical margins were reported in all cases. Patients with absence of grade ≤1 Clavien-Dindo complications. Compared with the clinical outcomes of standard RAPN, as reported in the literature, HR-assisted technology reduced the mean operative time, the WIT, and the EBL in patients undergoing RAPN. Therefore, combining HR with robotic abdominal surgery can enhance the efficiency of locating blood vessels and allow for more accurate resection of tumors.
As a novel and promising computer digital technology, HR can significantly improve the success of RAPN operations. This retrospective study demonstrated that HR-assisted operations resulted in shorter operation times and less perioperative complications and were thus safer and more effective in patients with renal tumors compared with RAPN not used HR.
探讨全息重建(HR)技术结合达芬奇机器人系统进行实时导航在肾肿瘤患者肾部分切除术(PN)中的疗效及优势。
收集2018年4月至2020年10月在我科接受机器人辅助肾部分切除术(RAPN)的41例完全位于肾内肿瘤患者的临床资料,并进行回顾性分析。所有手术均由同一外科医生完成。应用HR技术和三维(3D)重建技术进行实时导航,使用达芬奇机器人系统切除肿瘤。记录并分析患者的相关临床参数和手术结果。
HR技术能够在手术过程中准确评估肿瘤、肾门血管及周围器官。借助实时导航HR,所有病例均通过RAPN完成。平均手术时间为115.3±20.3(范围70 - 153)分钟,热缺血时间(WIT)为18.7±3.9(范围13 - 28)分钟。估计失血量(EBL)为98.8±18.7(范围60 - 141)毫升。所有病例均报告手术切缘阴性。患者无≤1级Clavien - Dindo并发症。与文献报道的标准RAPN临床结果相比,HR辅助技术缩短了接受RAPN患者的平均手术时间、WIT和EBL。因此,将HR与机器人腹部手术相结合可提高血管定位效率,并实现更准确的肿瘤切除。
作为一种新颖且有前景的计算机数字技术,HR可显著提高RAPN手术的成功率。这项回顾性研究表明,与未使用HR的RAPN相比,HR辅助手术的手术时间更短,围手术期并发症更少,因此在肾肿瘤患者中更安全、更有效。