School of Mechatronical Engineering, Beijing Institute of Technology, Beijing 100081, China.
Beijing Advanced Innovation Center for Intelligent Robot and System, Beijing 100081, China.
Sensors (Basel). 2021 Sep 17;21(18):6234. doi: 10.3390/s21186234.
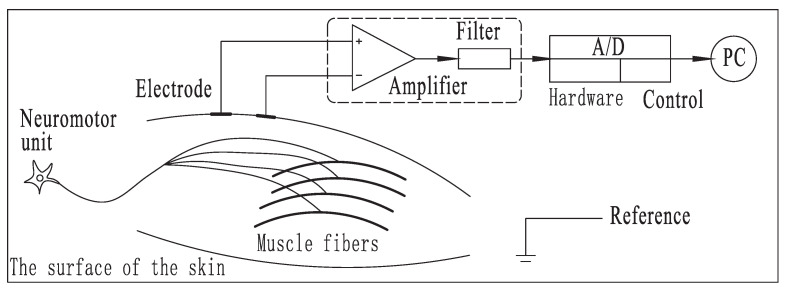
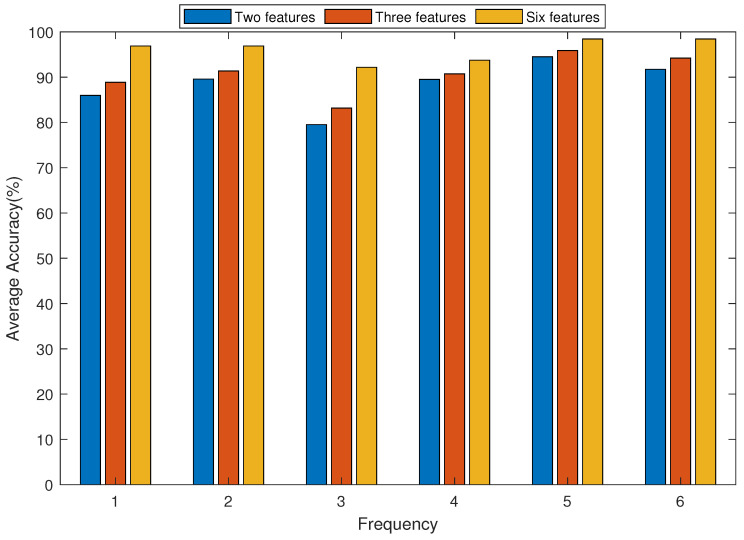
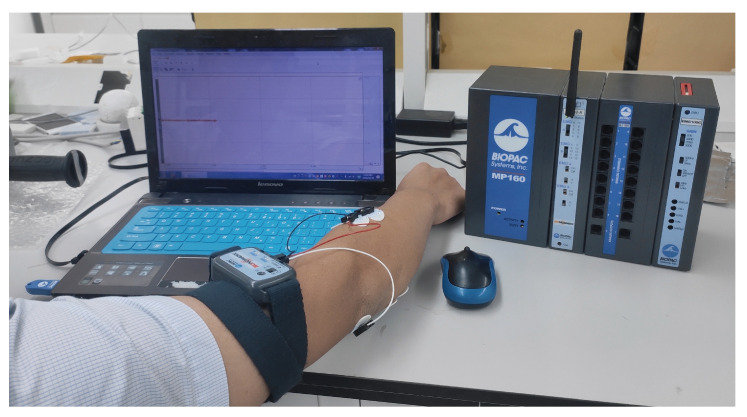
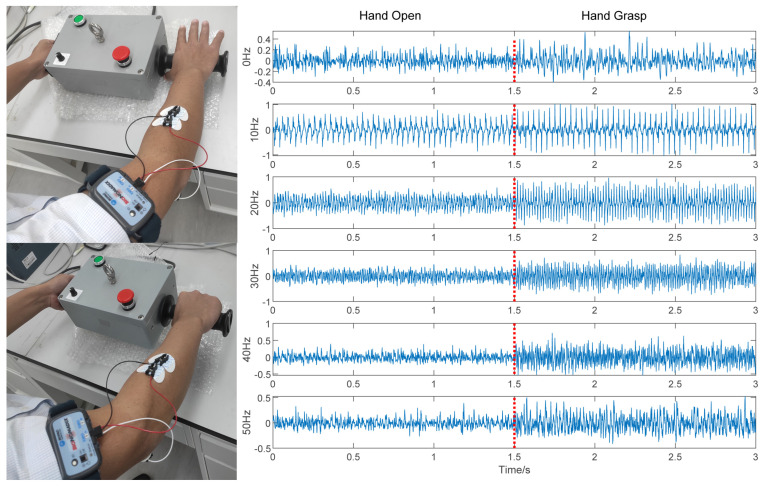
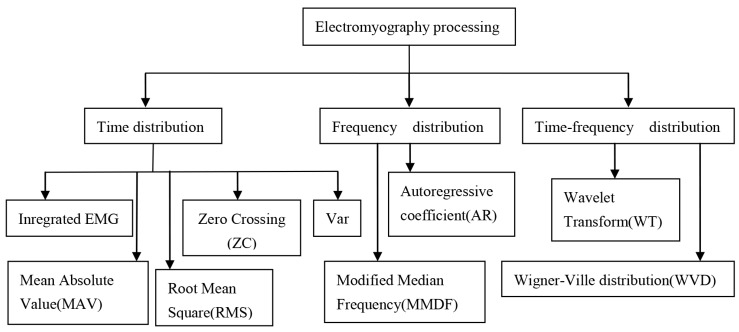
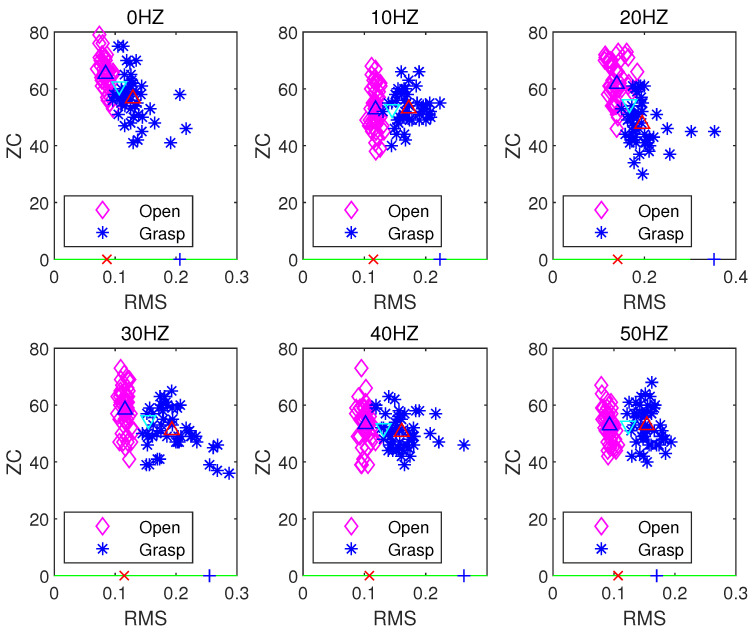
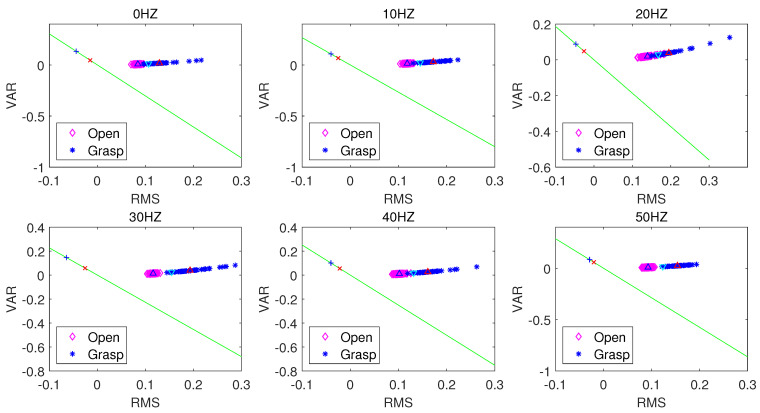
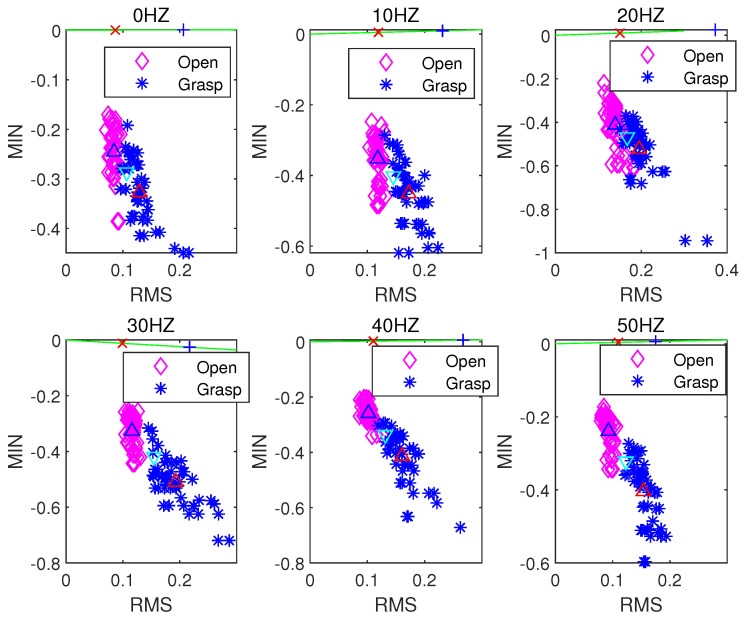
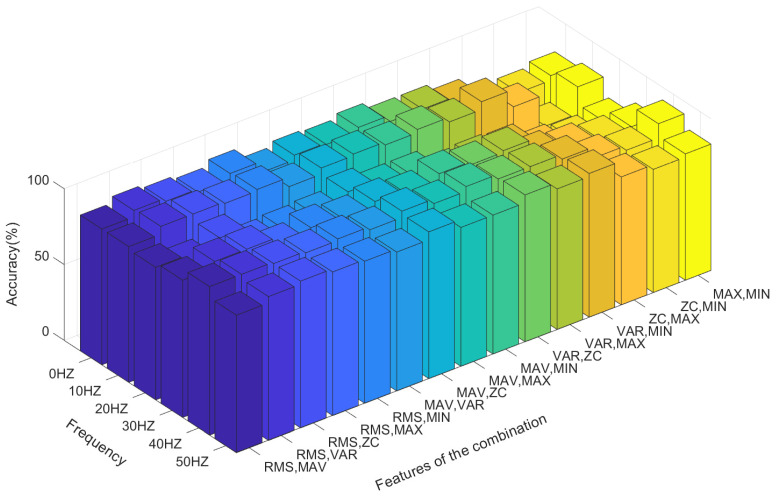
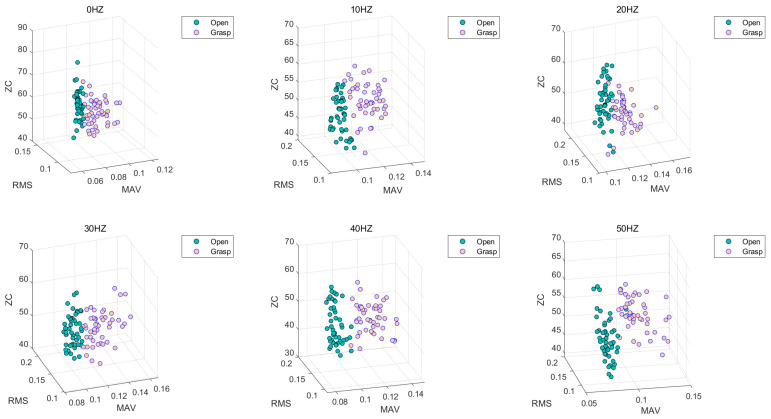
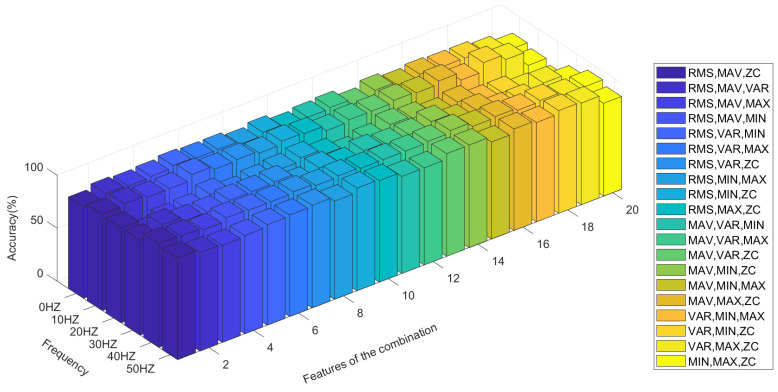
Myoelectric prosthesis has become an important aid to disabled people. Although it can help people to recover to a nearly normal life, whether they can adapt to severe working conditions is a subject that is yet to be studied. Generally speaking, the working environment is dominated by vibration. This paper takes the gripping action as its research object, and focuses on the identification of grasping intentions under different vibration frequencies in different working conditions. In this way, the possibility of the disabled people who wear myoelectric prosthesis to work in various vibration environment is studied. In this paper, an experimental test platform capable of simulating 0-50 Hz vibration was established, and the Surface Electromyography (sEMG) signals of the human arm in the open and grasping states were obtained through the MP160 physiological record analysis system. Considering the reliability of human intention recognition and the rapidity of algorithm processing, six different time-domain features and the Linear Discriminant Analysis (LDA) classifier were selected as the sEMG signal feature extraction and recognition algorithms in this paper. When two kinds of features, Zero Crossing (ZC) and Root Mean Square (RMS), were used as input, the accuracy of LDA algorithm can reach 96.9%. When three features, RMS, Minimum Value (MIN), and Variance (VAR), were used as inputs, the accuracy of the LDA algorithm can reach 98.0%. When the six features were used as inputs, the accuracy of the LDA algorithm reached 98.4%. In the analysis of different vibration frequencies, it was found that when the vibration frequency reached 20 Hz, the average accuracy of the LDA algorithm in recognizing actions was low, while at 0 Hz, 40 Hz and 50 Hz, the average accuracy was relatively high. This is of great significance in guiding disabled people to work in a vibration environment in the future.
肌电假体已成为残疾人的重要辅助工具。虽然它可以帮助人们恢复到几乎正常的生活,但他们是否能适应恶劣的工作条件是一个尚未研究的课题。一般来说,工作环境以振动为主。本文以抓握动作为研究对象,重点研究了在不同工作条件下不同振动频率下的抓握意图识别。这样,就可以研究佩戴肌电假体的残疾人在各种振动环境下工作的可能性。本文建立了一个能够模拟 0-50Hz 振动的实验测试平台,通过 MP160 生理记录分析系统获取人体手臂在张开和抓握状态下的表面肌电(sEMG)信号。考虑到人类意图识别的可靠性和算法处理的快速性,本文选择了六种不同的时域特征和线性判别分析(LDA)分类器作为 sEMG 信号特征提取和识别算法。当两种特征(过零(ZC)和均方根(RMS))作为输入时,LDA 算法的准确率可达 96.9%。当三种特征(RMS、最小值(MIN)和方差(VAR))作为输入时,LDA 算法的准确率可达 98.0%。当六种特征作为输入时,LDA 算法的准确率达到了 98.4%。在分析不同的振动频率时,发现当振动频率达到 20Hz 时,LDA 算法识别动作的平均准确率较低,而在 0Hz、40Hz 和 50Hz 时,平均准确率较高。这对未来指导残疾人在振动环境中工作具有重要意义。