Alattas Khalid A, Mohammadzadeh Ardashir, Mobayen Saleh, Aly Ayman A, Felemban Bassem F, Vu Mai The
Department of Computer Science and Artificial Intelligence, College of Computer Science and Engineering, University of Jeddah, Jeddah 23890, Saudi Arabia.
Independent Researcher, Baku 1148, Azerbaijan.
Micromachines (Basel). 2021 Nov 12;12(11):1390. doi: 10.3390/mi12111390.
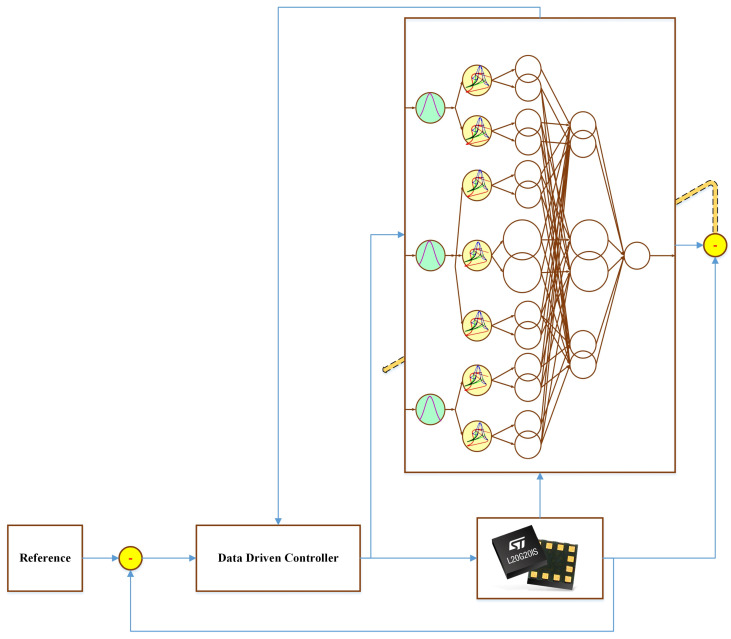
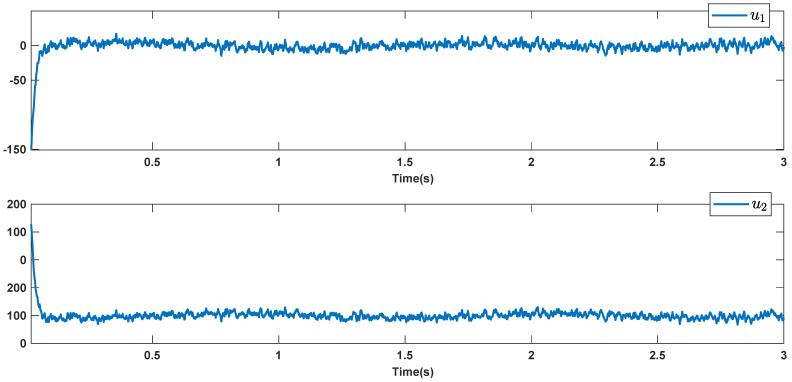
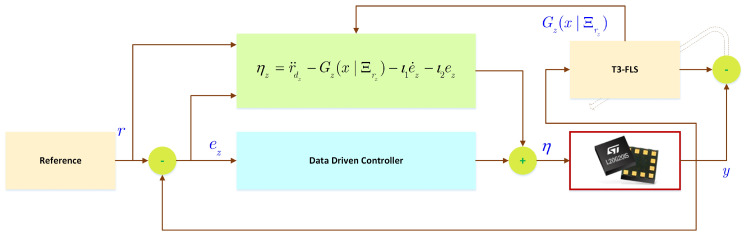
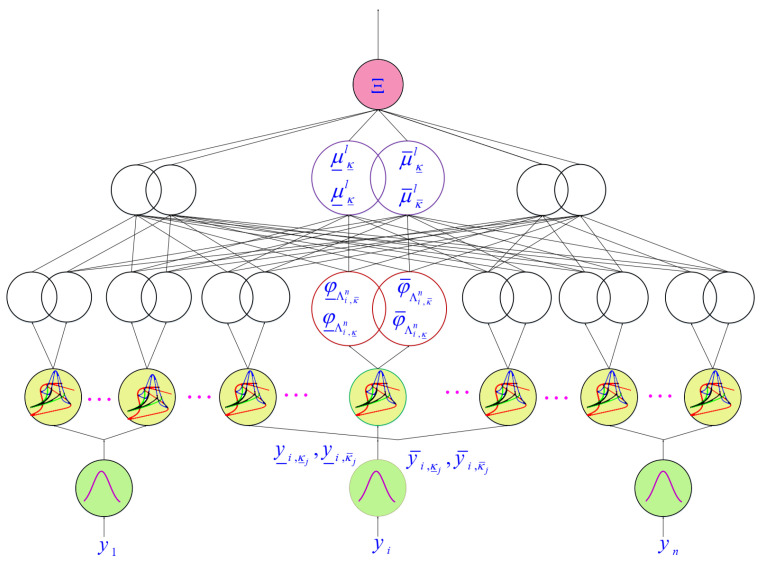
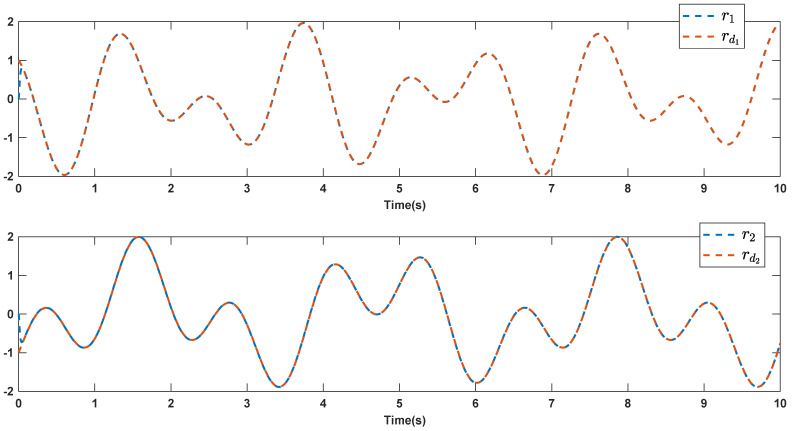
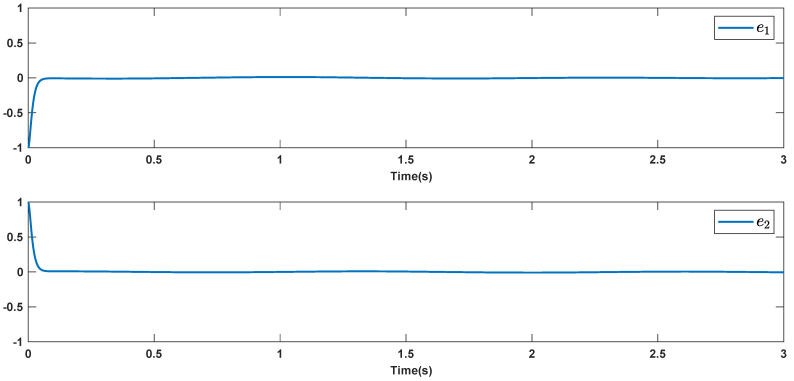
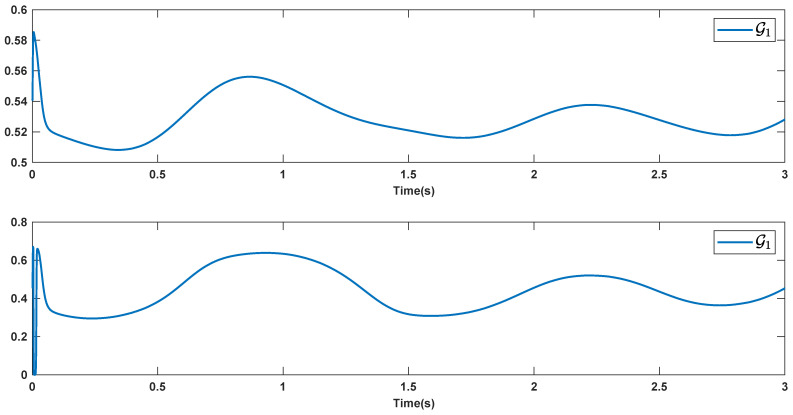
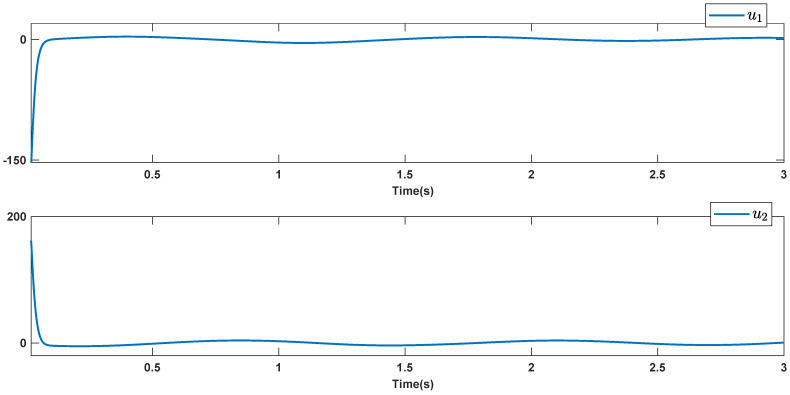
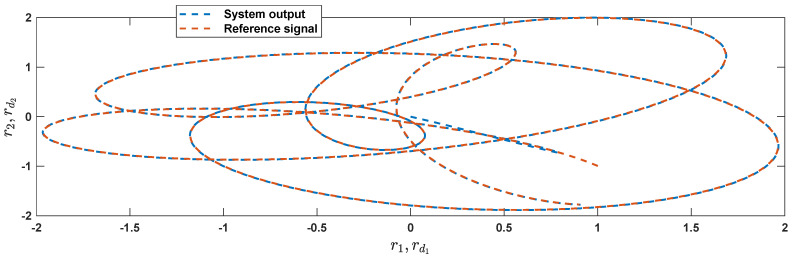
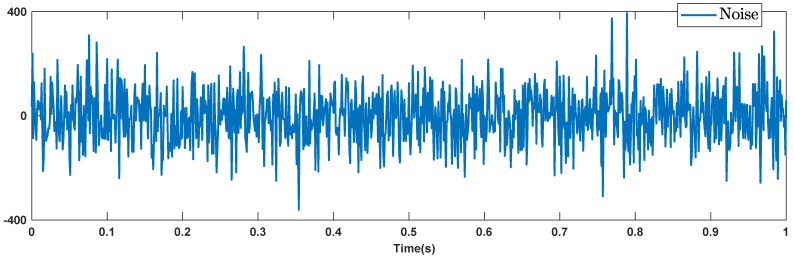
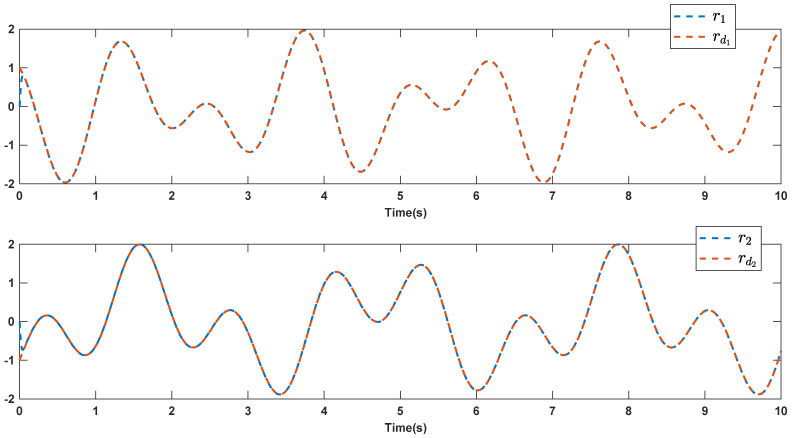
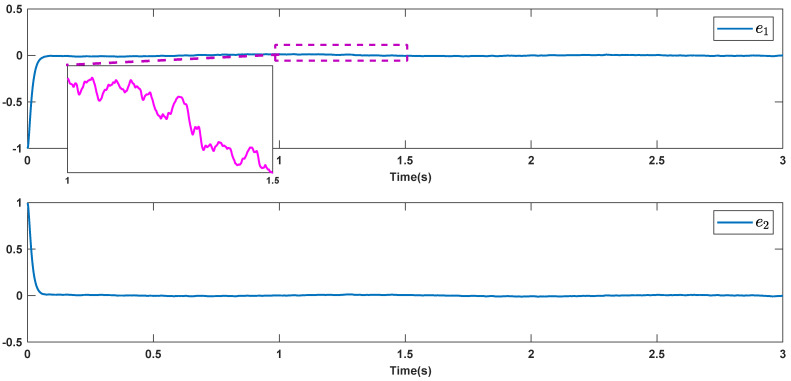
In this study, a novel data-driven control scheme is presented for MEMS gyroscopes (MEMS-Gs). The uncertainties are tackled by suggested type-3 fuzzy system with non-singleton fuzzification (NT3FS). Besides the dynamics uncertainties, the suggested NT3FS can also handle the input measurement errors. The rules of NT3FS are online tuned to better compensate the disturbances. By the input-output data set a data-driven scheme is designed, and a new LMI set is presented to ensure the stability. By several simulations and comparisons the superiority of the introduced control scheme is demonstrated.
在本研究中,提出了一种用于微机电系统陀螺仪(MEMS-Gs)的新型数据驱动控制方案。通过具有非单点模糊化的III型模糊系统(NT3FS)来处理不确定性。除了动力学不确定性外,所提出的NT3FS还可以处理输入测量误差。NT3FS的规则在线调整以更好地补偿干扰。通过输入输出数据集设计了一种数据驱动方案,并提出了一个新的线性矩阵不等式集以确保稳定性。通过多次仿真和比较,证明了所引入控制方案的优越性。