Ze Qiji, Wu Shuai, Nishikawa Jun, Dai Jize, Sun Yue, Leanza Sophie, Zemelka Cole, Novelino Larissa S, Paulino Glaucio H, Zhao Ruike Renee
Department of Mechanical Engineering, Stanford University, Stanford, CA 94305, USA.
Department of Mechanical and Aerospace Engineering, The Ohio State University, Columbus, OH 43210, USA.
Sci Adv. 2022 Apr;8(13):eabm7834. doi: 10.1126/sciadv.abm7834. Epub 2022 Mar 30.
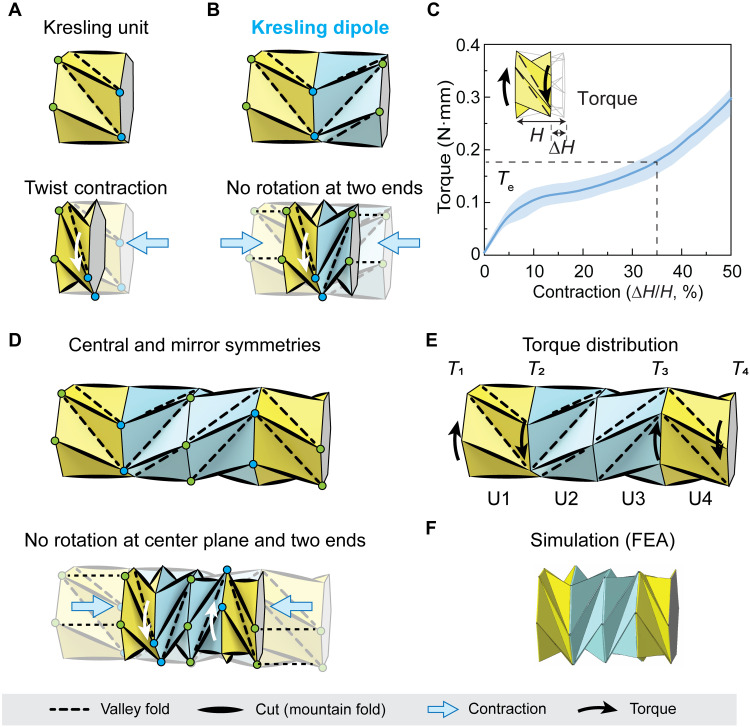
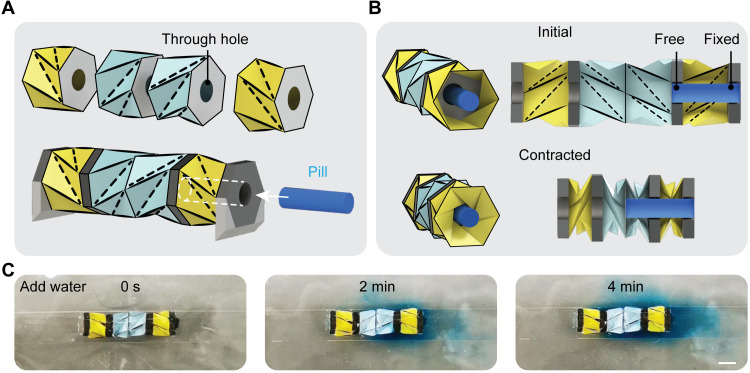
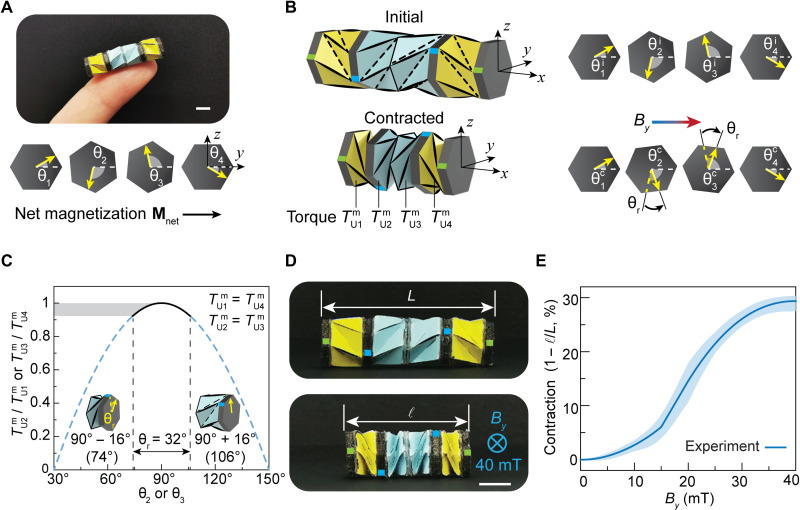
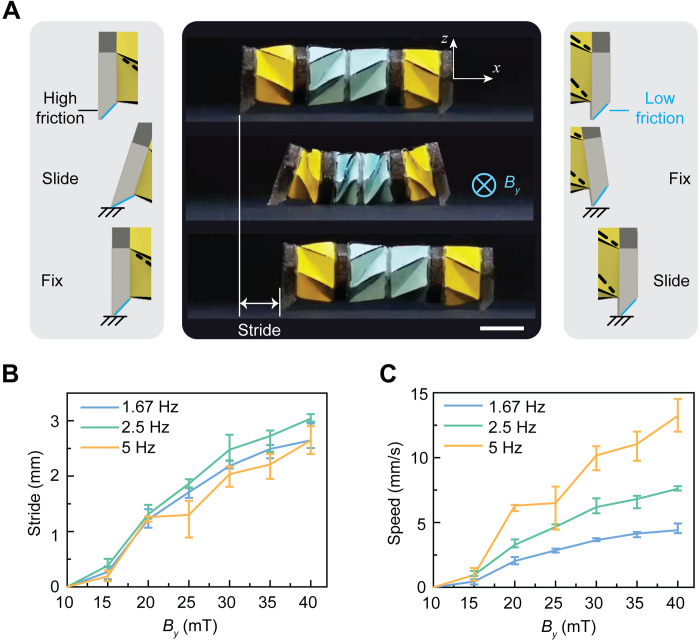
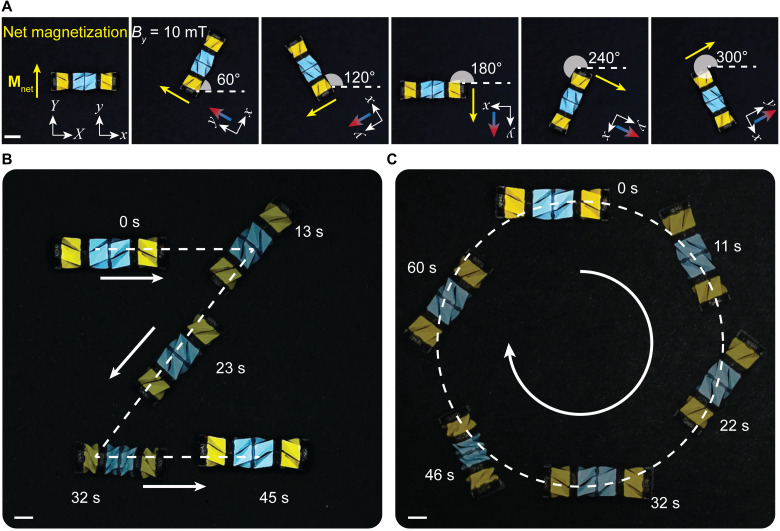
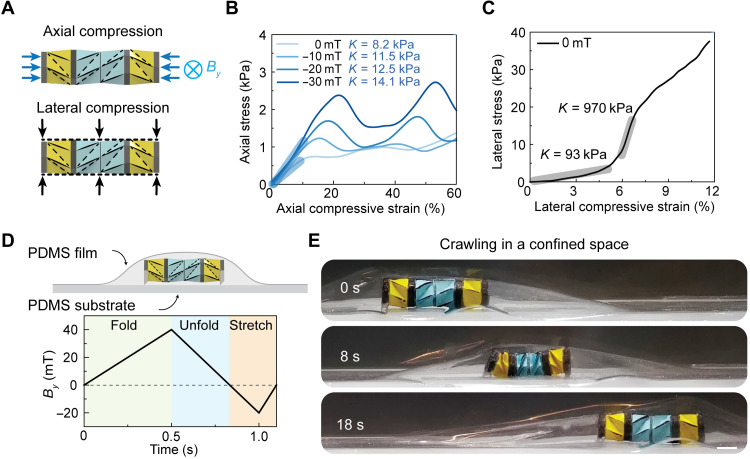
Biomimetic soft robotic crawlers have attracted extensive attention in various engineering fields, owing to their adaptivity to different terrains. Earthworm-like crawlers realize locomotion through in-plane contraction, while inchworm-like crawlers exhibit out-of-plane bending-based motions. Although in-plane contraction crawlers demonstrate effective motion in confined spaces, miniaturization is challenging because of limited actuation methods and complex structures. Here, we report a magnetically actuated small-scale origami crawler with in-plane contraction. The contraction mechanism is achieved through a four-unit Kresling origami assembly consisting of two Kresling dipoles with two-level symmetry. Magnetic actuation is used to provide appropriate torque distribution, enabling a small-scale and untethered robot with both crawling and steering capabilities. The crawler can overcome large resistances from severely confined spaces by its anisotropic and magnetically tunable structural stiffness. The multifunctionality of the crawler is explored by using the internal cavity of the crawler for drug storage and release. The magnetic origami crawler can potentially serve as a minimally invasive device for biomedical applications.
仿生软机器爬虫由于其对不同地形的适应性,在各个工程领域引起了广泛关注。蚯蚓状爬虫通过平面内收缩实现运动,而尺蠖状爬虫则表现出基于平面外弯曲的运动。尽管平面内收缩爬虫在受限空间中展示了有效的运动,但由于驱动方法有限和结构复杂,小型化具有挑战性。在此,我们报道了一种具有平面内收缩的磁驱动小型折纸爬虫。收缩机制是通过一个由两个具有二级对称性的克雷斯林偶极子组成的四单元克雷斯林折纸组件实现的。磁驱动用于提供适当的扭矩分布,使小型化且无系绳的机器人同时具备爬行和转向能力。该爬虫能够通过其各向异性且可磁调谐的结构刚度克服来自极度受限空间的巨大阻力。通过利用爬虫的内部腔体进行药物储存和释放,探索了该爬虫的多功能性。这种磁性折纸爬虫有望成为用于生物医学应用的微创设备。