Goh Qi-Lun, Chee Pei-Song, Lim Eng-Hock, Ng Danny Wee-Kiat
Department of Mechatronics and Biomedical Engineering, Lee Kong Chian Faculty of Engineering and Science, Universiti Tunku Abdul Rahman, Bandar Sungai Long, Kajang 43000, Selangor, Malaysia.
Department of Electrical and Electronic Engineering, Lee Kong Chian Faculty of Engineering and Science, Universiti Tunku Abdul Rahman, Bandar Sungai Long, Kajang 43000, Selangor, Malaysia.
Nanomaterials (Basel). 2022 Apr 12;12(8):1317. doi: 10.3390/nano12081317.
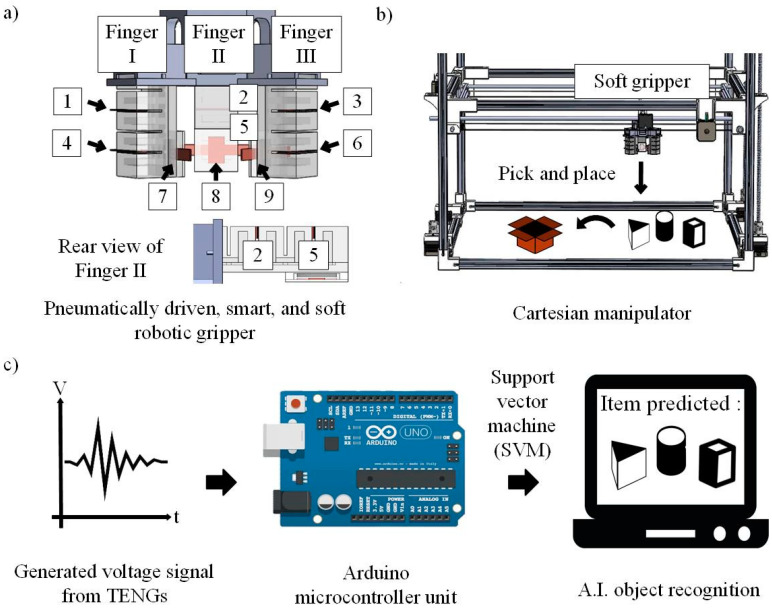
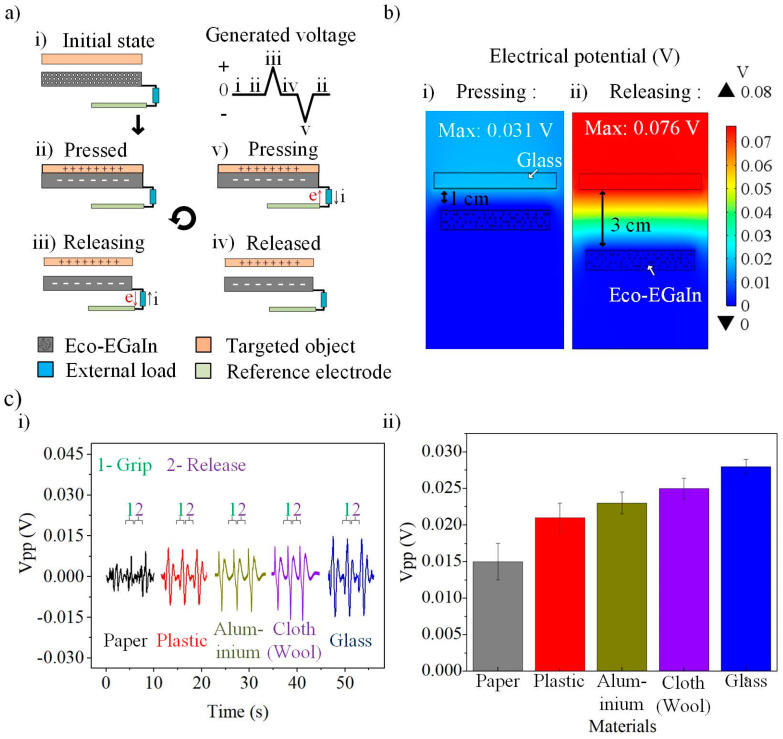
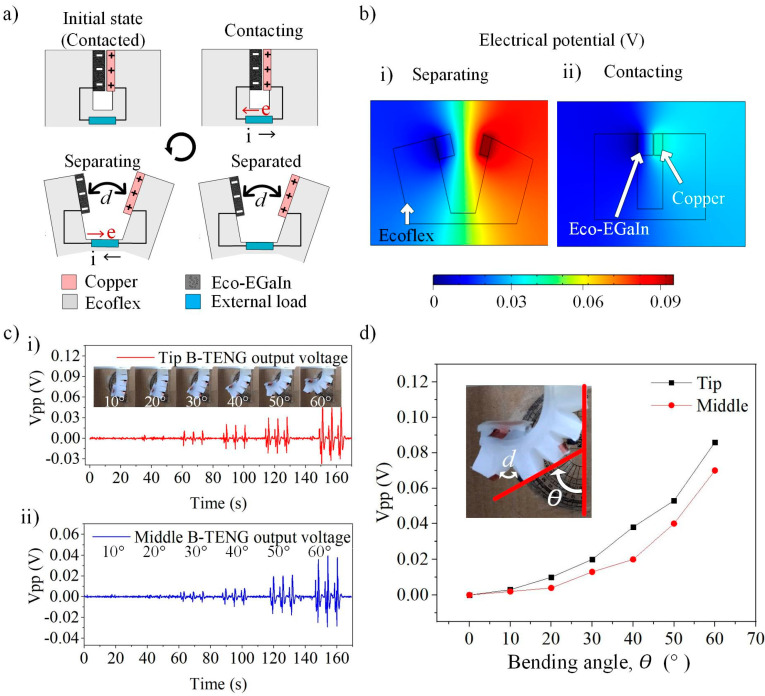
High compliance and muscle-alike soft robotic grippers have shown promising performance in addressing the challenges in traditional rigid grippers. Nevertheless, a lack of control feedback (gasping speed and contact force) in a grasping operation can result in undetectable slipping and false positioning. In this study, a pneumatically driven and self-powered soft robotic gripper that can recognize the grabbed object is reported. We integrated pressure (P-TENG) and bend (B-TENG) triboelectric sensors into a soft robotic gripper to transduce the features of gripped objects in a pick-and-place operation. Both the P-TENG and B-TENG sensors are fabricated using a porous structure made of soft Ecoflex and Euthethic Gallium-Indium nanocomposite (Eco-EGaIn). The output voltage of this porous setup has been improved by 63%, as compared to the non-porous structure. The developed soft gripper successfully recognizes three different objects, cylinder, cuboid, and pyramid prism, with a good accuracy of 91.67% and has shown its potential to be beneficial in the assembly lines, sorting, VR/AR application, and education training.
高柔顺性且类似肌肉的软机器人抓手在应对传统刚性抓手的挑战方面已展现出颇具前景的性能。然而,抓取操作中缺乏控制反馈(抓取速度和接触力)可能导致无法察觉的滑动和错误定位。在本研究中,报道了一种能够识别被抓取物体的气动驱动且自供电的软机器人抓手。我们将压力摩擦电纳米发电机(P-TENG)和弯曲摩擦电纳米发电机(B-TENG)集成到一个软机器人抓手中,以在拾取和放置操作中转换被抓取物体的特征。P-TENG和B-TENG传感器均采用由柔软的Ecoflex和富镓铟纳米复合材料(Eco-EGaIn)制成的多孔结构制造。与无孔结构相比,这种多孔装置的输出电压提高了63%。所开发的软抓手成功识别了三种不同的物体,圆柱体、长方体和三棱柱,识别准确率高达91.67%,并已显示出其在装配线、分拣、虚拟现实/增强现实应用以及教育培训中的潜在益处。