Department of Mechanical Engineering, Kyung Hee University, Yongin-si 17104, Korea.
Department of Industry-Academic Cooperation Foundation, Kyung Hee University, Yongin-si 17104, Korea.
Sensors (Basel). 2022 Apr 13;22(8):2996. doi: 10.3390/s22082996.
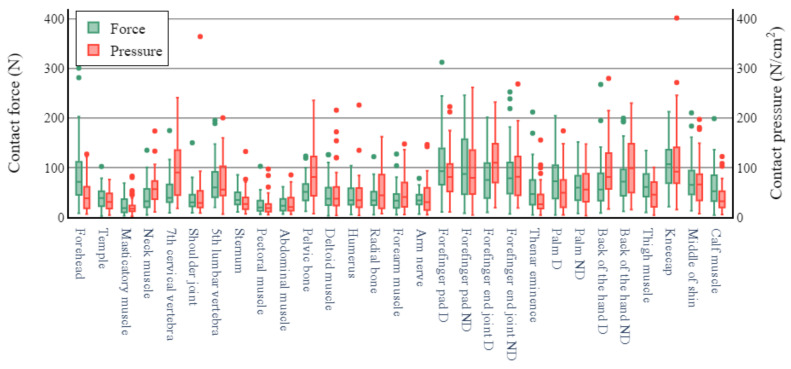
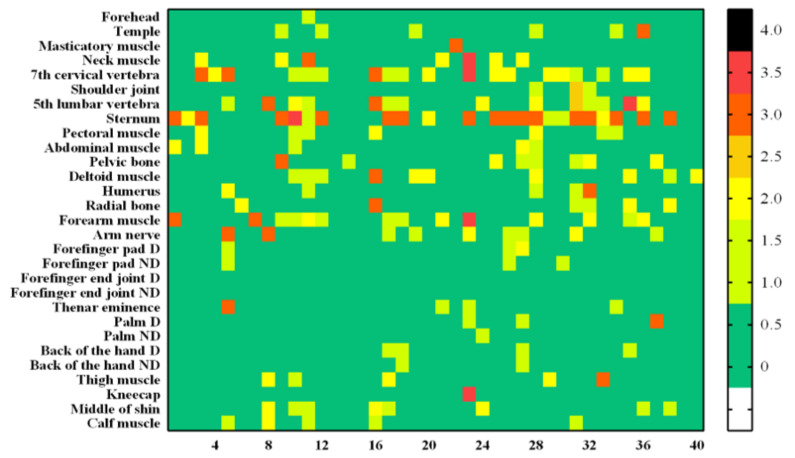
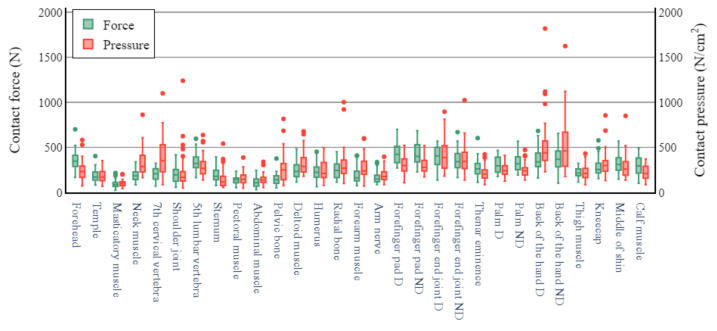
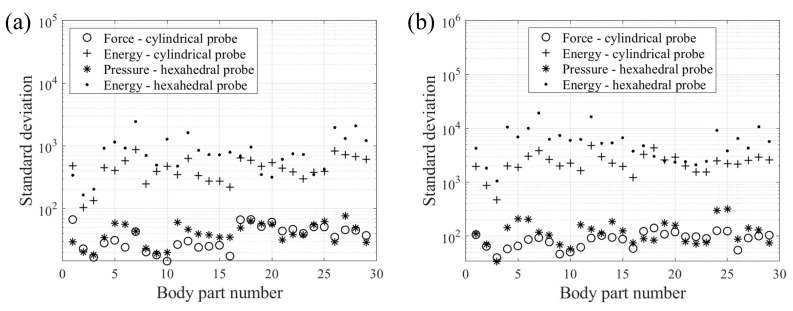
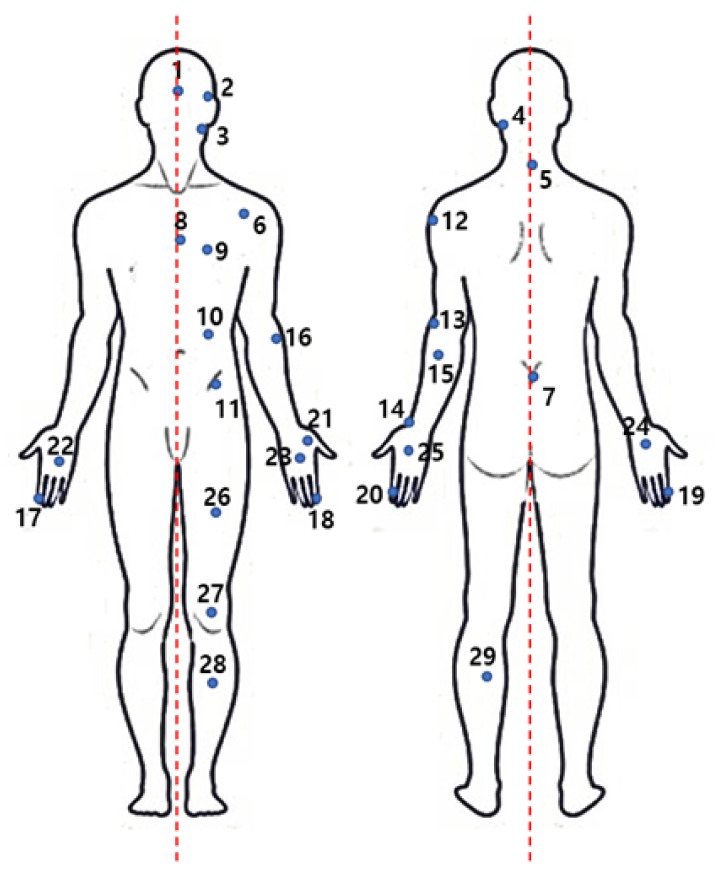
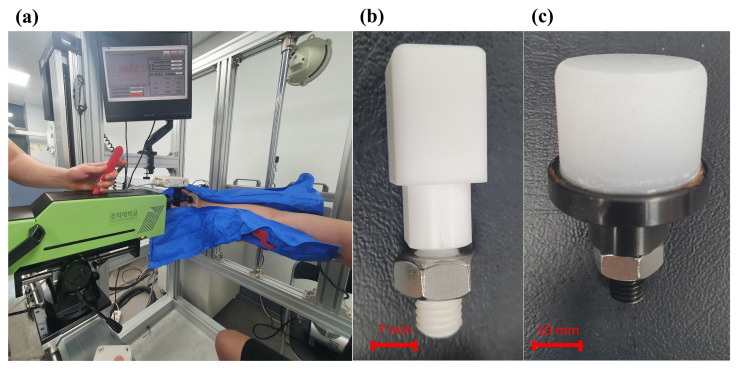
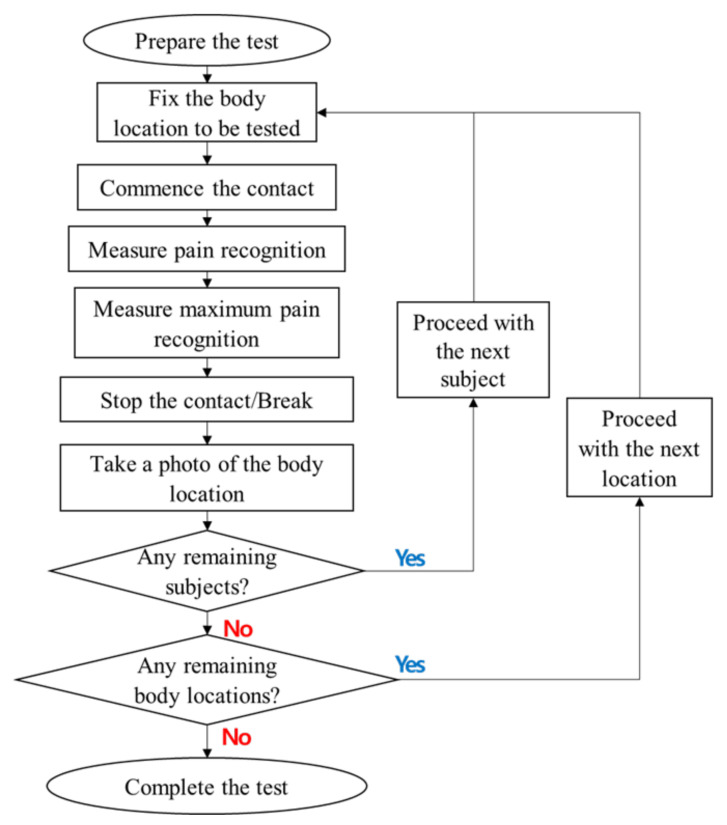
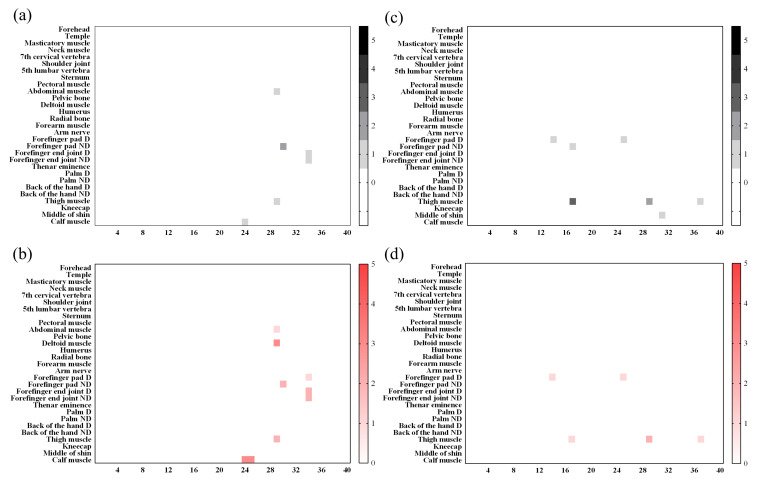
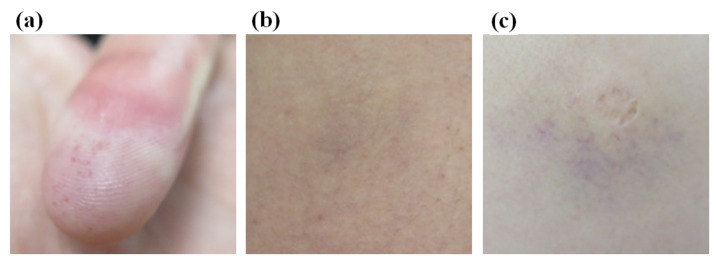
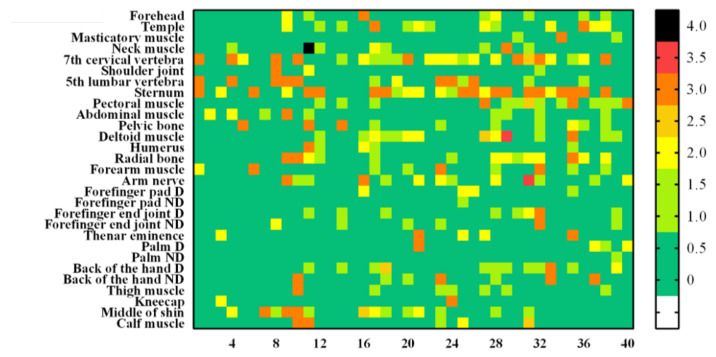
With the development of robot technology, robot utilization is expanding in industrial fields and everyday life. To employ robots in various fields wherein humans and robots share the same space, human safety must be guaranteed in the event of a human-robot collision. Therefore, criteria and limitations of safety need to be defined and well clarified. In this study, we induced mechanical pain in humans through quasi-static contact by an algometric device (at 29 parts of the human body). A manual apparatus was developed to induce and monitor a force and pressure. Forty healthy men participated voluntarily in the study. Physical quantities were classified based on pain onset and maximum bearable pain. The overall results derived from the trials pertained to the subjective concept of pain, which led to considerable inter-individual variation in the onset and threshold of pain. Based on the results, a quasi-static contact pain evaluation method was established, and biomechanical safety limitations on forces and pressures were formulated. The pain threshold attributed to quasi-static contact can serve as a safety standard for the robots employed.
随着机器人技术的发展,机器人在工业领域和日常生活中的应用正在不断扩大。为了在人类和机器人共享空间的各种领域中使用机器人,必须在发生人机碰撞时确保人类的安全。因此,需要定义和明确安全标准和限制。在这项研究中,我们通过使用一种等速测痛仪(在人体的 29 个部位)对人类进行准静态接触诱导机械性疼痛。开发了一种手动装置来诱发和监测力和压力。40 名健康男性自愿参加了这项研究。根据疼痛发作和最大耐受疼痛将物理量进行分类。试验的总体结果涉及疼痛的主观概念,这导致疼痛发作和阈值存在相当大的个体差异。基于这些结果,建立了一种准静态接触疼痛评估方法,并制定了力和压力的生物力学安全限制。准静态接触引起的疼痛阈值可以作为机器人使用的安全标准。