Zhou Guoqing, Zhou Xiang, Chen Jinlong, Jia Guoshuai, Zhu Qiang
School of Microelectronics, Tianjin University, Tianjin 300072, China.
The Center of Remote Sensing, Tianjin University, Tianjin 300072, China.
Sensors (Basel). 2022 Jun 19;22(12):4628. doi: 10.3390/s22124628.
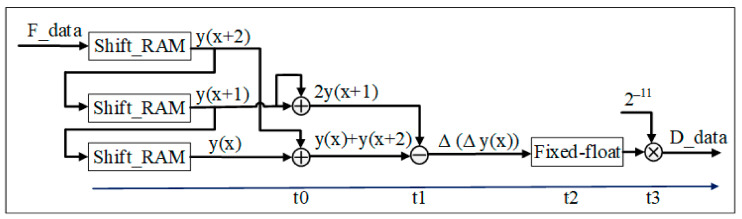
As the existing processing algorithms for LiDAR echo decomposition are time-consuming, this paper proposes an FPGA-based improved Gaussian full-waveform decomposition method. The proposed FPGA architecture consists of three modules: (i) a pre-processing module, which is used to pipeline data reading and Gaussian filtering, (ii) the inflection point coordinate solution module, applied to the second-order differential operation and to calculate inflection point coordinates, and (iii) the Gaussian component parameter solution and echo component positioning module, which is utilized to calculate the Gaussian component and echo time parameters. Finally, two LiDAR datasets, covering the Congo and Antarctic regions, are used to verify the accuracy and speed of the proposed method. The experimental results show that (i) the accuracy of the FPGA-based processing is equivalent to that of PC-based processing, and (ii) the processing speed of the FPGA-based processing is 292 times faster than that of PC-based processing.
由于现有的激光雷达回波分解处理算法耗时较长,本文提出了一种基于现场可编程门阵列(FPGA)的改进高斯全波形分解方法。所提出的FPGA架构由三个模块组成:(i)预处理模块,用于流水线数据读取和高斯滤波;(ii)拐点坐标求解模块,用于二阶微分运算并计算拐点坐标;(iii)高斯分量参数求解与回波分量定位模块,用于计算高斯分量和回波时间参数。最后,使用覆盖刚果和南极地区的两个激光雷达数据集来验证所提方法的准确性和速度。实验结果表明:(i)基于FPGA的处理精度与基于个人计算机(PC)的处理精度相当;(ii)基于FPGA的处理速度比基于PC的处理速度快292倍。