Hashemi Ali, Jang Jinwoo, Hosseini-Hashemi Shahrokh
Department of Civil, Environmental and Geomatics Engineering, Florida Atlantic University, Boca Raton, FL 33431, USA.
Department of Mechanical Engineering, Iran University of Science and Technology, Tehran 13114-16846, Iran.
Sensors (Basel). 2022 Jul 29;22(15):5691. doi: 10.3390/s22155691.
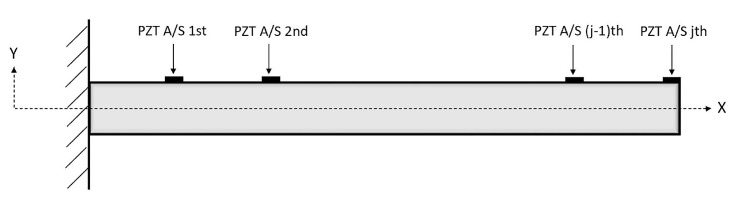
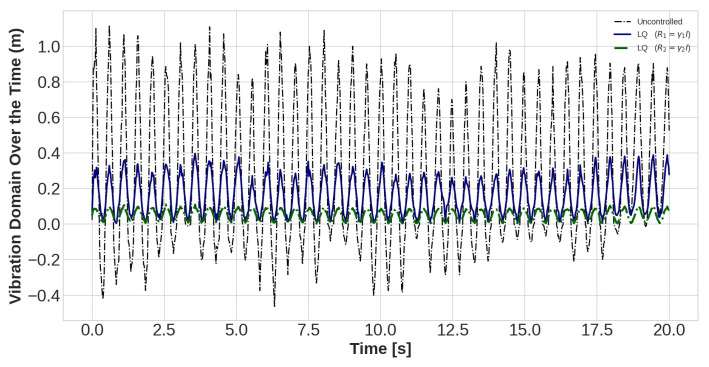
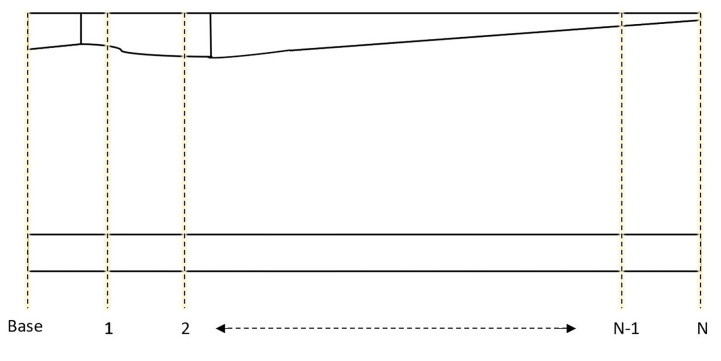
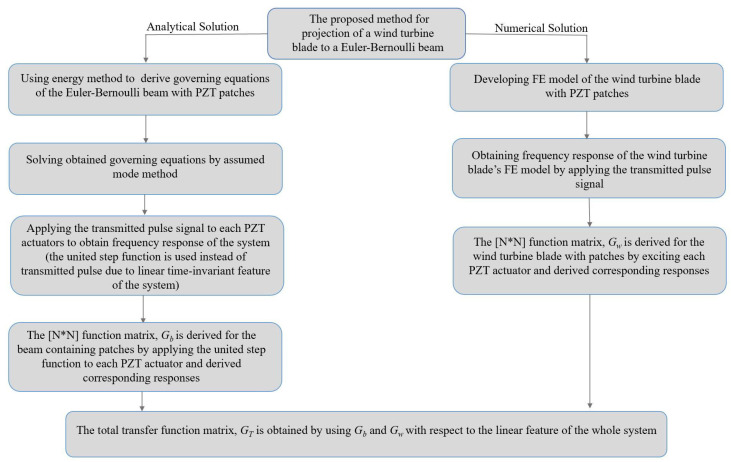
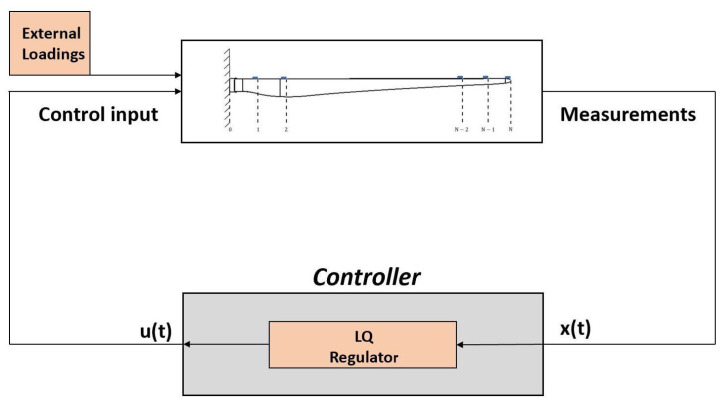
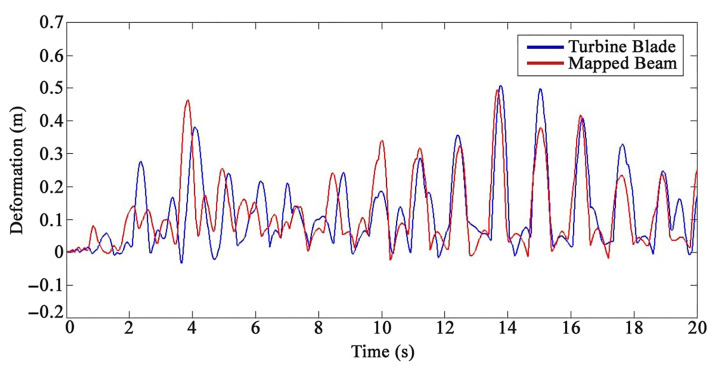
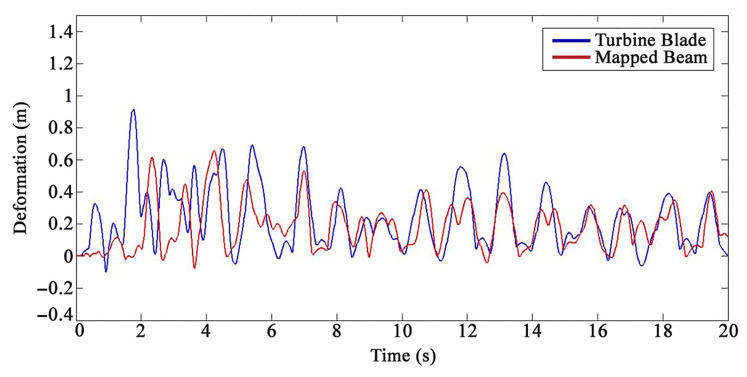
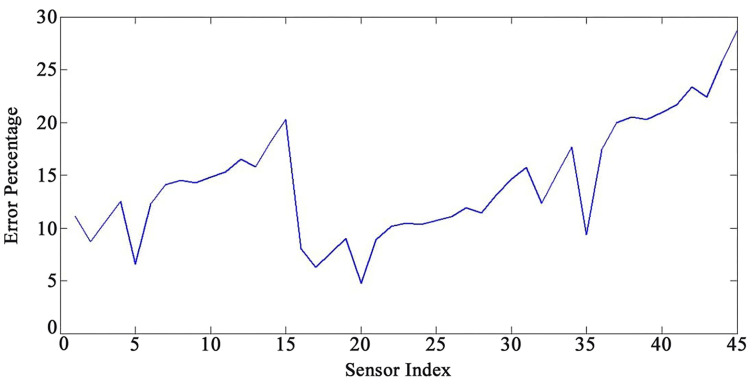
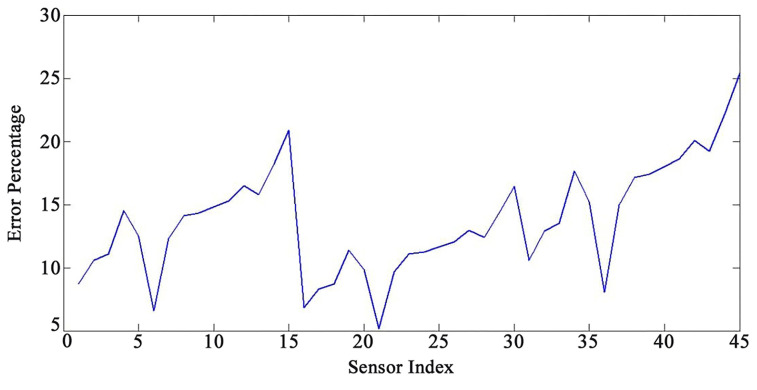
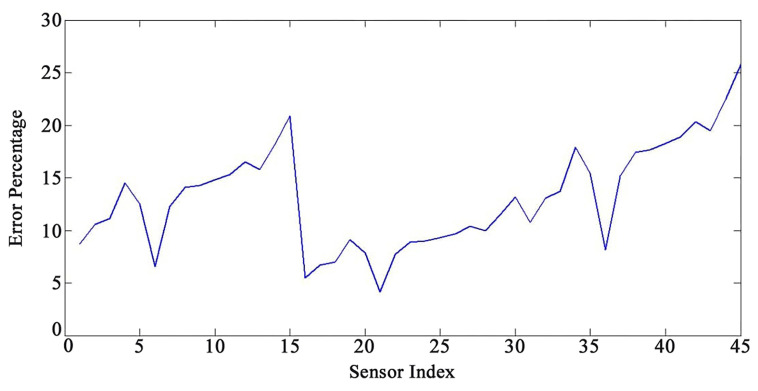
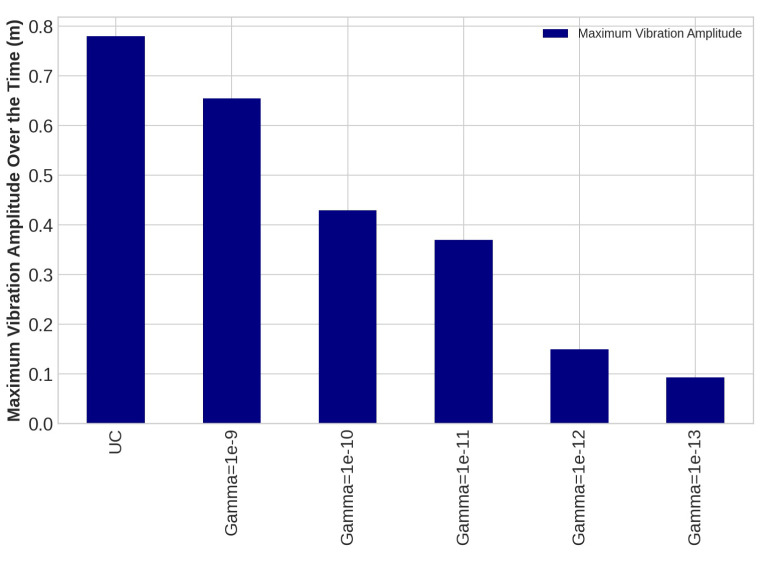
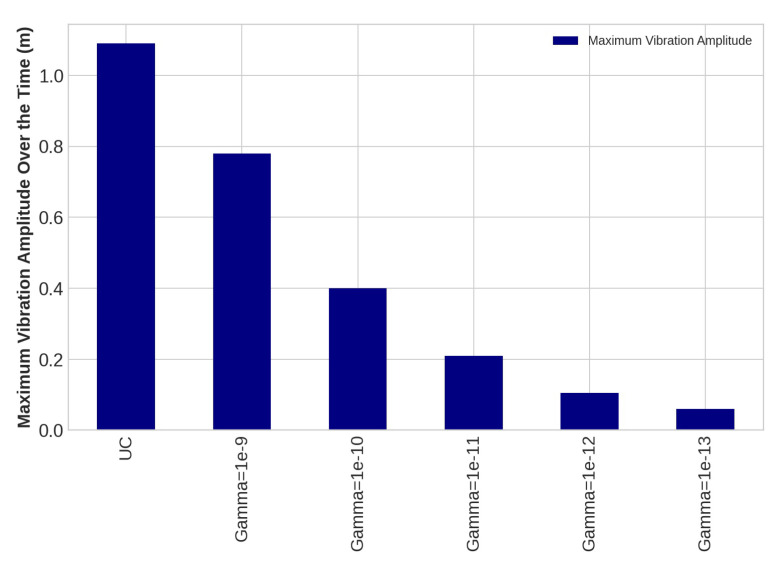
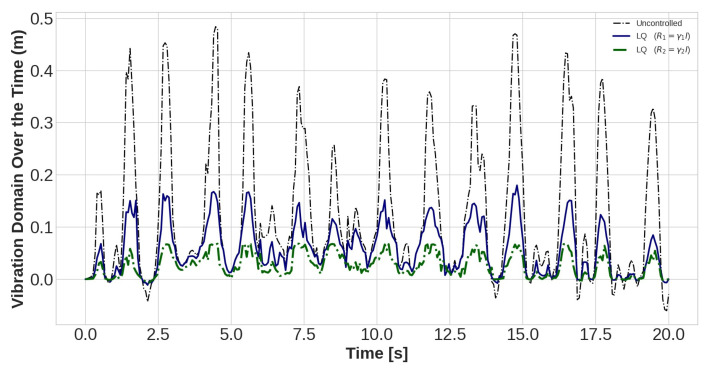
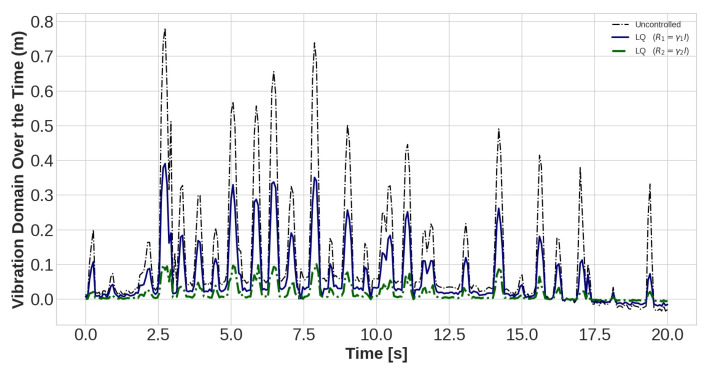
A smart active vibration control (AVC) system containing piezoelectric (PZT) actuators, jointly with a linear quadratic regulator (LQR) controller, is proposed in this article to control transverse deflections of a wind turbine (WT) blade. In order to apply controlling rules to the WT blade, a state-of-the-art semi-analytical solution is developed to obtain WT blade lateral displacement under external loadings. The proposed method maps the WT blade to a Euler-Bernoulli beam under the same conditions to find the blade's vibration and dynamic responses by solving analytical vibration solutions of the Euler-Bernoulli beam. The governing equations of the beam with PZT patches are derived by integrating the PZT transducer vibration equations into the vibration equations of the Euler-Bernoulli beam structure. A finite element model of the WT blade with PZT patches is developed. Next, a unique transfer function matrix is derived by exciting the structures and achieving responses. The beam structure is projected to the blade using the transfer function matrix. The results obtained from the mapping method are compared with the counter of the blade's finite element model. A satisfying agreement is observed between the results. The results showed that the method's accuracy decreased as the sensors' distance from the base of the wind turbine increased. In the designing process of the LQR controller, various weighting factors are used to tune control actions of the AVC system. LQR optimal control gain is obtained by using the state-feedback control law. The PZT actuators are located at the same distance from each other an this effort to prevent neutralizing their actuating effects. The LQR shows significant performance by diminishing the weights on the control input in the cost function. The obtained results indicate that the proposed smart control system efficiently suppresses the vibration peaks along the WT blade and the maximum flap-wise displacement belonging to the tip of the structure is successfully controlled.
本文提出了一种包含压电(PZT)致动器的智能主动振动控制(AVC)系统,并结合线性二次调节器(LQR)控制器来控制风力涡轮机(WT)叶片的横向挠度。为了将控制规则应用于WT叶片,开发了一种先进的半解析解,以获得外部载荷作用下WT叶片的横向位移。该方法在相同条件下将WT叶片映射为欧拉-伯努利梁,通过求解欧拉-伯努利梁的解析振动解来找到叶片的振动和动态响应。通过将PZT换能器振动方程集成到欧拉-伯努利梁结构的振动方程中,推导了带有PZT贴片的梁的控制方程。建立了带有PZT贴片的WT叶片的有限元模型。接下来,通过激励结构并获取响应,推导了一个独特的传递函数矩阵。利用传递函数矩阵将梁结构投影到叶片上。将映射方法得到的结果与叶片有限元模型的结果进行了比较。结果之间观察到令人满意的一致性。结果表明,随着传感器与风力涡轮机底部距离的增加,该方法的精度降低。在LQR控制器的设计过程中,使用了各种加权因子来调整AVC系统的控制动作。通过使用状态反馈控制律获得LQR最优控制增益。PZT致动器彼此之间的距离相同,以防止抵消它们的致动效果。LQR通过减少成本函数中控制输入的权重显示出显著的性能。所得结果表明,所提出的智能控制系统有效地抑制了WT叶片上的振动峰值,并且成功地控制了结构尖端的最大挥舞位移。