Wang Shubo, Song Jianli, Qi Peng, Yuan Changjian, Wu Hecheng, Zhang Lanting, Liu Weihong, Liu Yajia, He Xiongkui
Centre for Chemicals Application Technology, College of Science, College of Agricultural Unmanned System, China Agricultural University, Beijing, China.
Front Plant Sci. 2022 Aug 1;13:960686. doi: 10.3389/fpls.2022.960686. eCollection 2022.
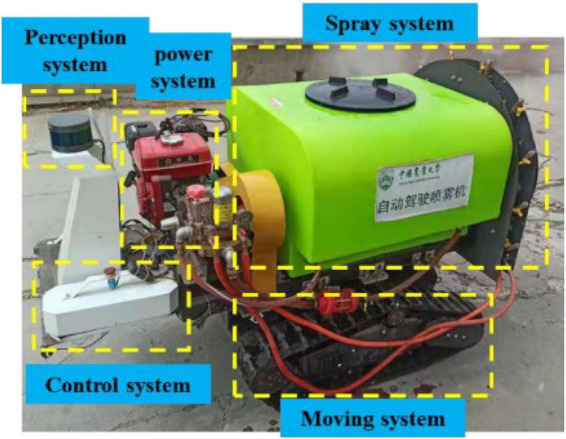
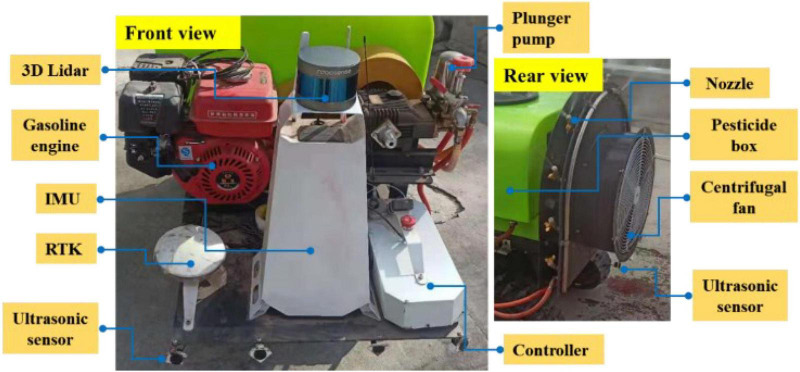
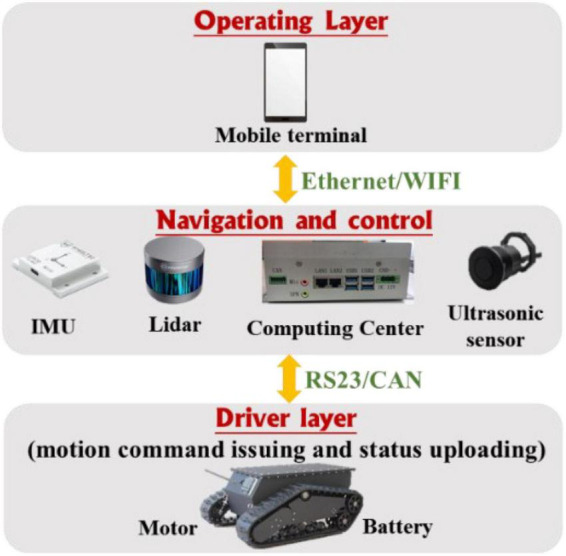
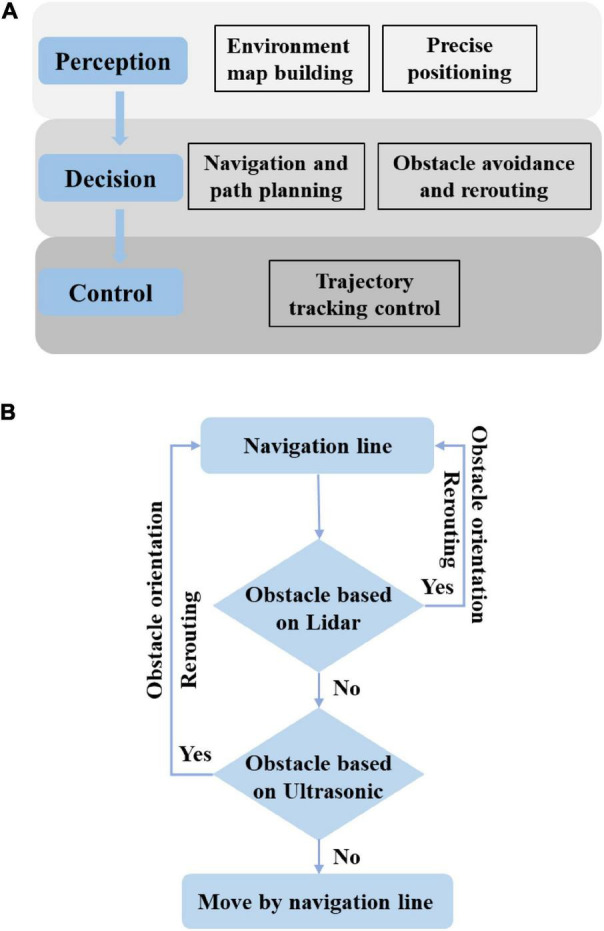
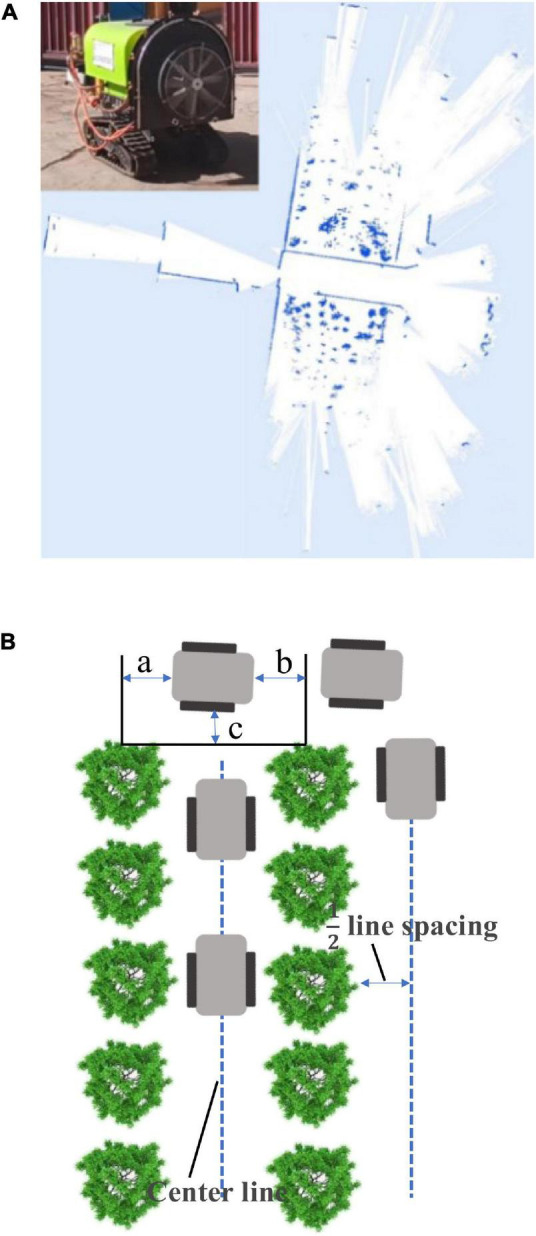
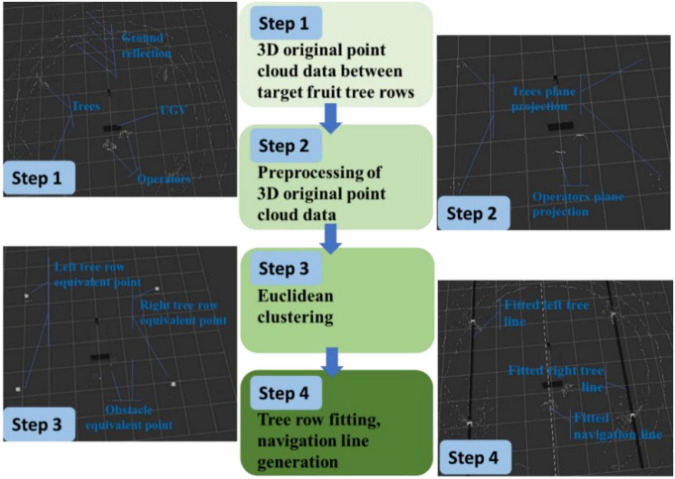
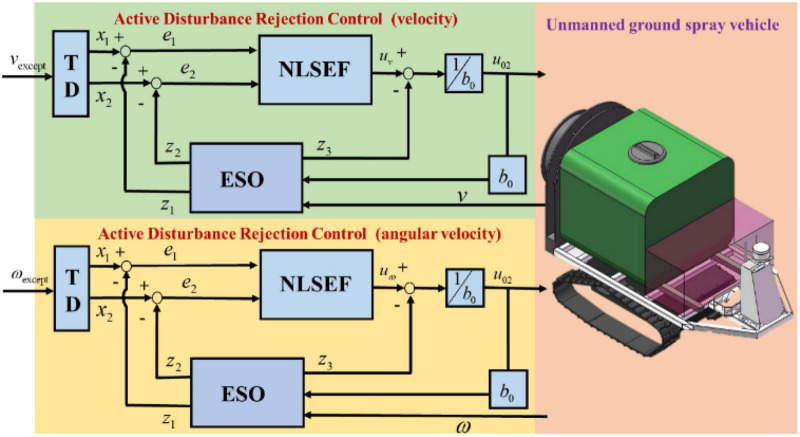
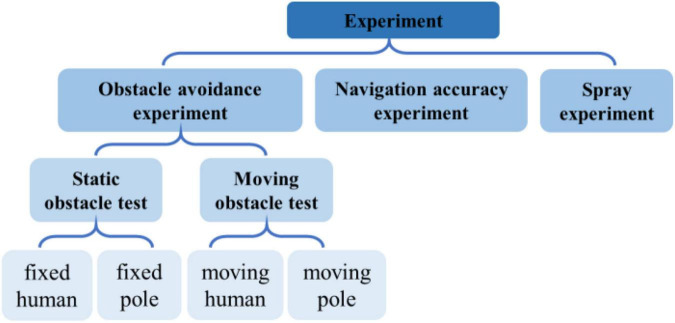
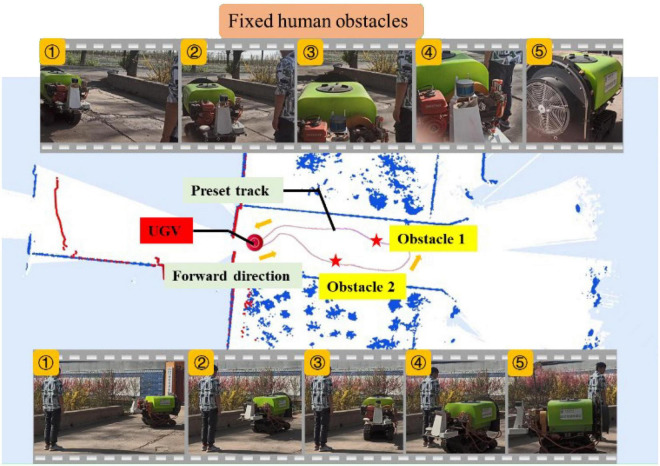
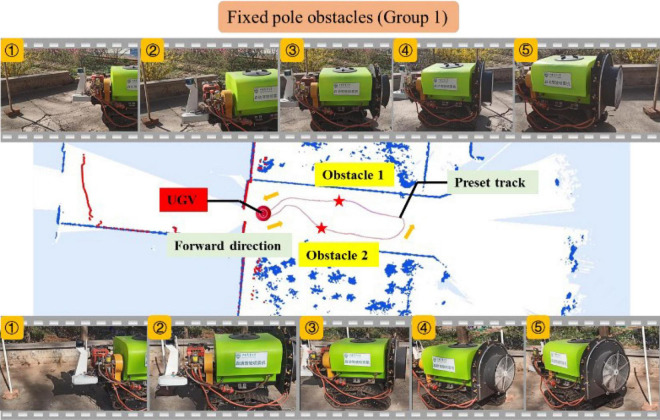
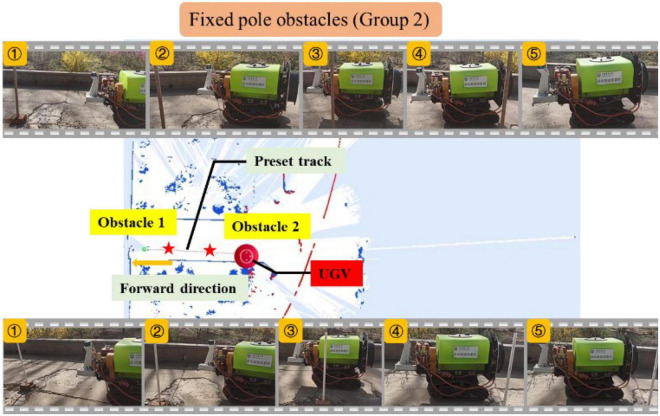
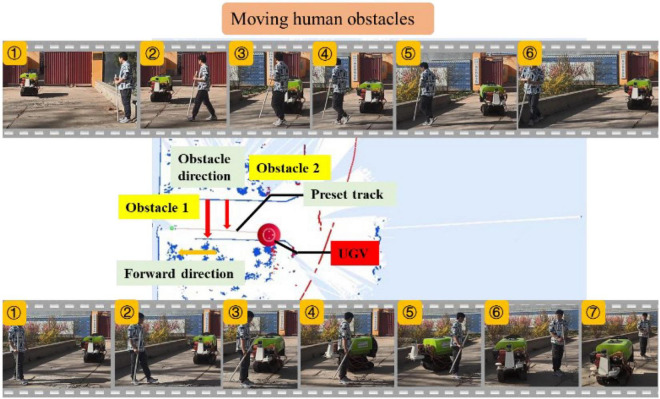
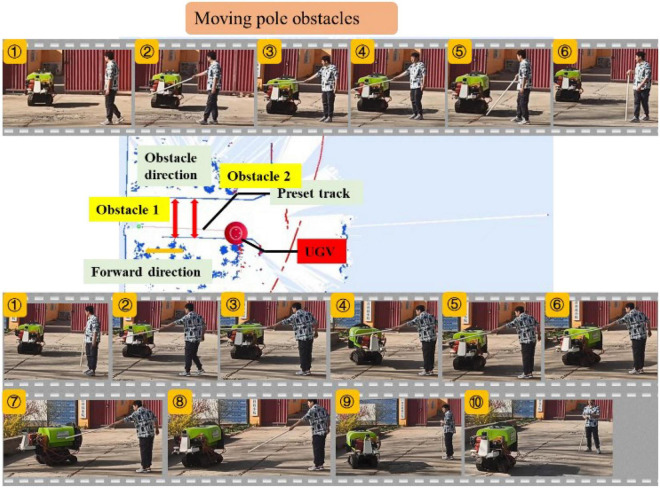
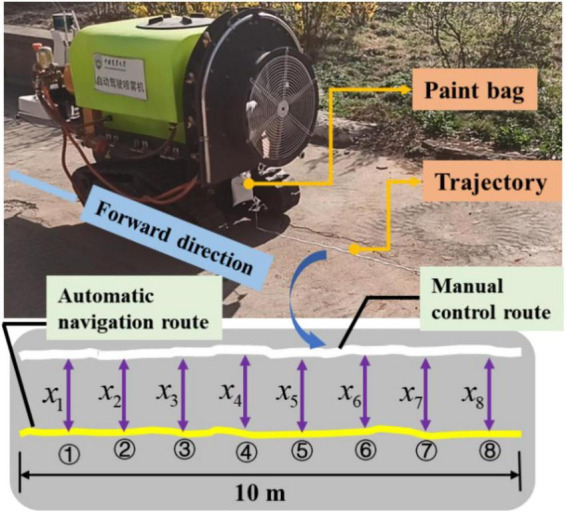
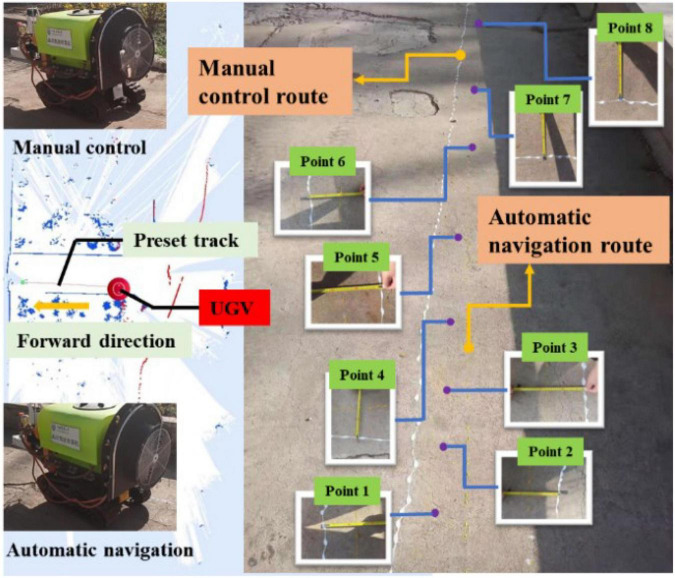
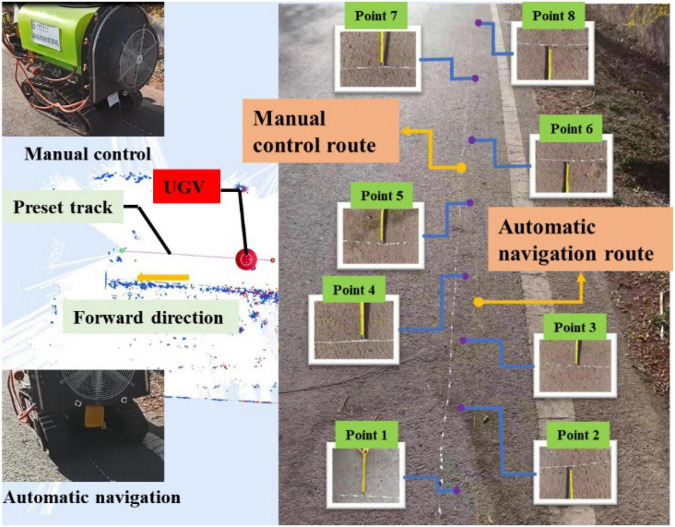
Driven by the demand for efficient plant protection in orchards, the autonomous navigation system for orchards is hereby designed and developed in this study. According to the three modules of unmanned system "perception-decision-control," the environment perception and map construction strategy based on 3D lidar is constructed for the complex environment in orchards. At the same time, millimeter-wave radar is further selected for multi-source information fusion for the perception of obstacles. The extraction of orchard navigation lines is achieved by formulating a four-step extraction strategy according to the obtained lidar data. Finally, aiming at the control problem of plant protection machine, the ADRC control strategy is adopted to enhance the noise immunity of the system. Different working conditions are designed in the experimental section for testing the obstacle avoidance performance and navigation accuracy of the autonomous navigation sprayer. The experimental results show that the unmanned vehicle can identify the obstacle quickly and make an emergency stop and find a rather narrow feasible area when a moving person or a different thin column is used as an obstacle. Many experiments have shown a safe distance for obstacle avoidance about 0.5 m, which meets the obstacle avoidance requirements. In the navigation accuracy experiment, the average navigation error in both experiments is within 15 cm, satisfying the requirements for orchard spray operation. A set of spray test experiments are designed in the final experimental part to further verify the feasibility of the system developed by the institute, and the coverage rate of the leaves of the canopy is about 50%.
受果园高效植保需求驱动,本研究设计并开发了果园自主导航系统。依据无人系统“感知-决策-控制”的三个模块,针对果园复杂环境构建了基于三维激光雷达的环境感知与地图构建策略。同时,进一步选用毫米波雷达进行多源信息融合以感知障碍物。通过根据获取的激光雷达数据制定四步提取策略实现果园导航线的提取。最后,针对植保机的控制问题,采用自抗扰控制策略提升系统的抗干扰能力。在实验部分设计了不同工况,以测试自主导航喷雾器的避障性能和导航精度。实验结果表明,当以移动的人或不同细柱体作为障碍物时,无人车能快速识别障碍物并紧急停车,找到相当狭窄的可行区域。多次实验表明避障安全距离约为0.5米,满足避障要求。在导航精度实验中,两次实验的平均导航误差均在15厘米以内,满足果园喷雾作业要求。在最后实验部分设计了一组喷雾测试实验,进一步验证了该研究所开发系统的可行性,树冠叶片覆盖率约为50%。