Xu Baoguo, Zhang Kun, Yang Xinhao, Liu Deping, Hu Cong, Li Huijun, Song Aiguo
The State Key Laboratory of Bioelectronics, Jiangsu Key Laboratory of Remote Measurement and Control, School of Instrument Science and Engineering, Southeast University, Nanjing, China.
Guangxi Key Laboratory of Automatic Detecting Technology and Instruments, Guilin University of Electronic Technology, Guilin, China.
Front Neurosci. 2022 Oct 20;16:1020086. doi: 10.3389/fnins.2022.1020086. eCollection 2022.
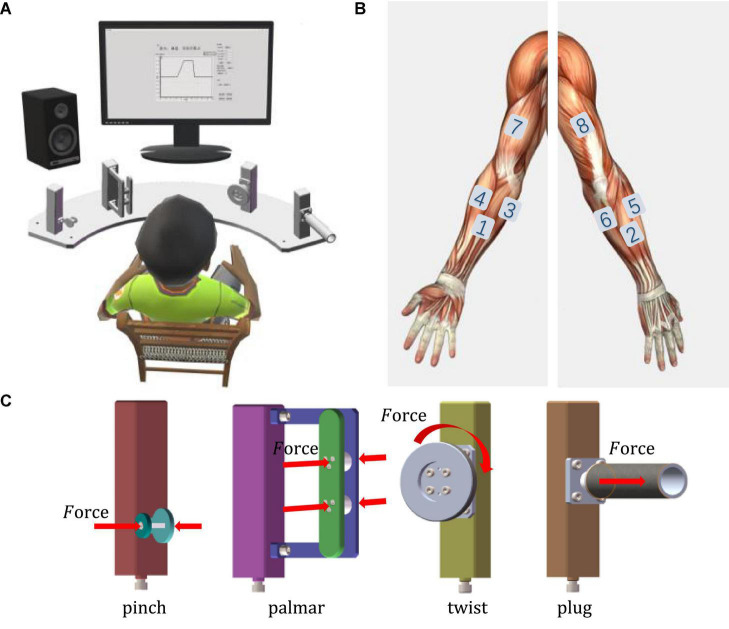
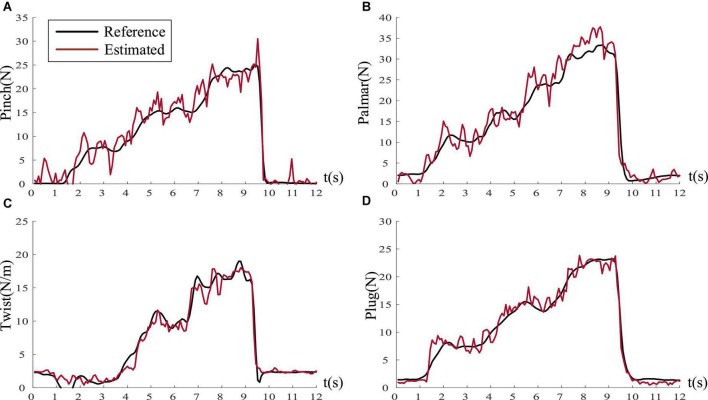
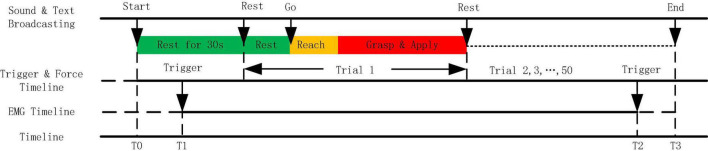
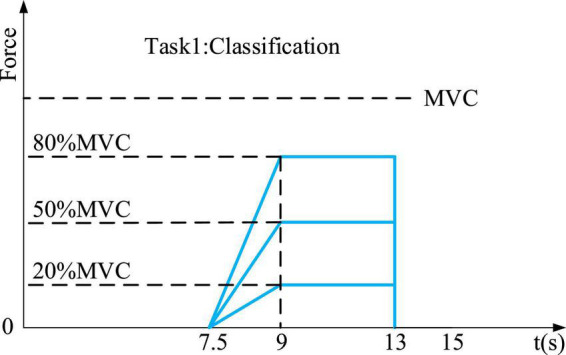
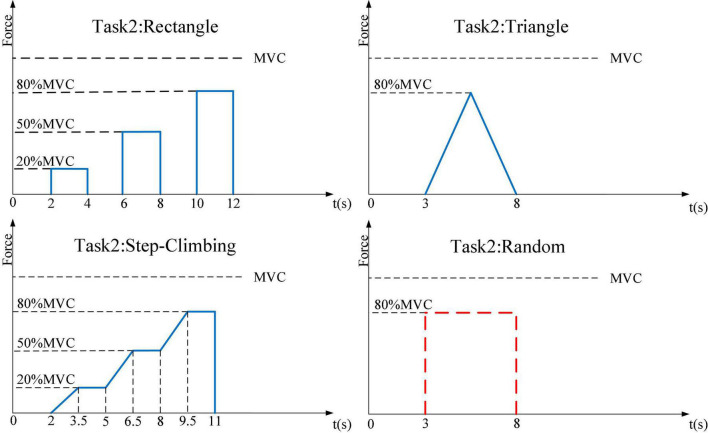
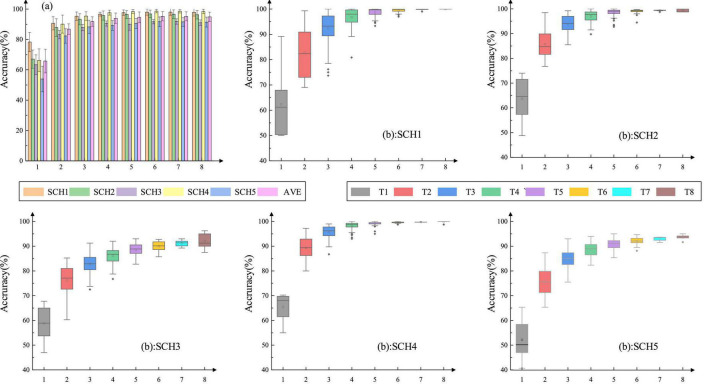
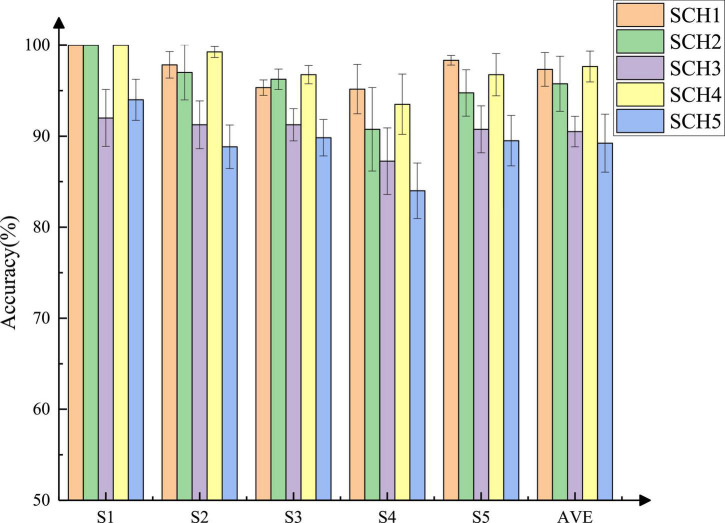
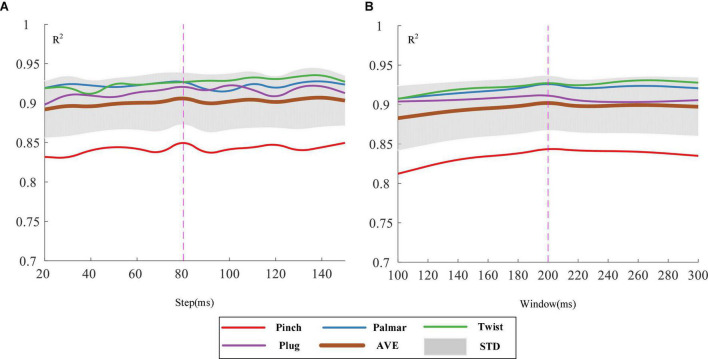
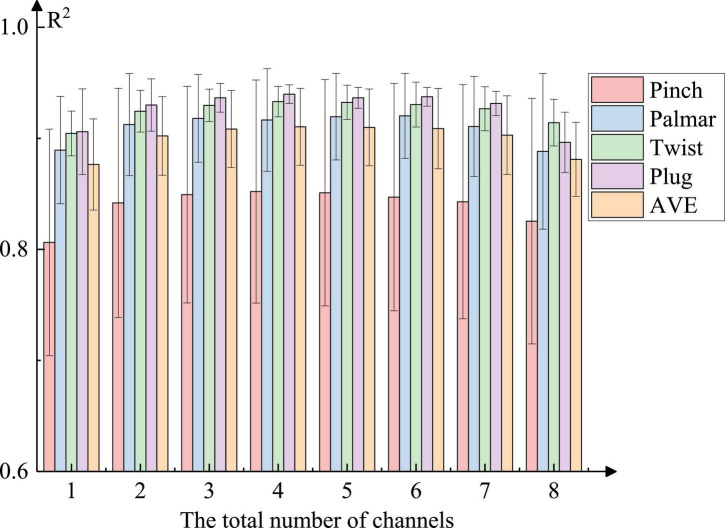
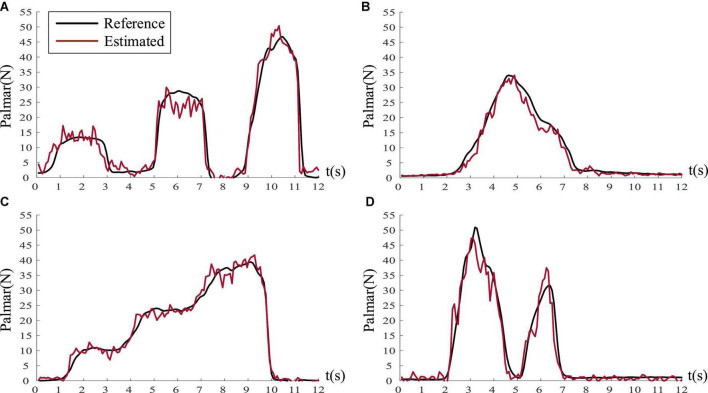
Electromyography (EMG) generated by human hand movements is usually used to decode different action types with high accuracy. However, the classifications of the gestures rarely consider the impact of force, and the estimation of the grasp force when performing natural grasping movements is so far overlooked. Decoding natural grasping movements and estimating the force generated by the associated movements can help patients to improve the accuracy of prosthesis control. This study mainly focused on two aspects: the classification of four natural grasping movements and the force estimation of these actions. For this purpose, we designed an experimental platform where subjects could perform four common natural grasping movements in daily life, including pinch, palmar, twist, and plug grasp, to complete target profiles. On the one hand, the results showed that, for natural grasping movements with different levels of force (three levels at 20, 50, and 80%), the average accuracy could reach from 91.43 to 97.33% under five classification schemes. On the other hand, the feasibility of force estimation for natural grasping movements was demonstrated. Furthermore, in the process of force estimation, we confirmed that the regression performance about plug grasp was the best, and the average could reach 0.9082. Besides, we found that the regression results were affected by the speed of force application. These findings contribute to the natural control of myoelectric prosthesis and the EMG-based rehabilitation training system, improving the user's experience and acceptance.
由人类手部动作产生的肌电图(EMG)通常用于高精度解码不同的动作类型。然而,手势分类很少考虑力的影响,并且在执行自然抓握动作时对抓握力的估计至今仍被忽视。解码自然抓握动作并估计相关动作产生的力有助于患者提高假肢控制的准确性。本研究主要集中在两个方面:四种自然抓握动作的分类以及这些动作的力估计。为此,我们设计了一个实验平台,受试者可以在该平台上执行日常生活中四种常见的自然抓握动作,包括捏、掌抓、扭转和插拔抓握,以完成目标任务。一方面,结果表明,对于不同力水平(20%、50%和80%三个水平)的自然抓握动作,在五种分类方案下平均准确率可达91.43%至97.33%。另一方面,证明了自然抓握动作力估计的可行性。此外,在力估计过程中,我们证实插拔抓握的回归性能最佳,平均值可达0.9082。此外,我们发现回归结果受施力速度的影响。这些发现有助于肌电假肢的自然控制和基于EMG的康复训练系统,改善用户体验和接受度。