Department of Mechanical Engineering, Faculty of Engineering, Chulalongkorn University, Bangkok 10330, Thailand.
Department of Electrical Engineering, Faculty of Engineering, Chulalongkorn University, Bangkok 10330, Thailand.
Sensors (Basel). 2022 Dec 20;23(1):17. doi: 10.3390/s23010017.
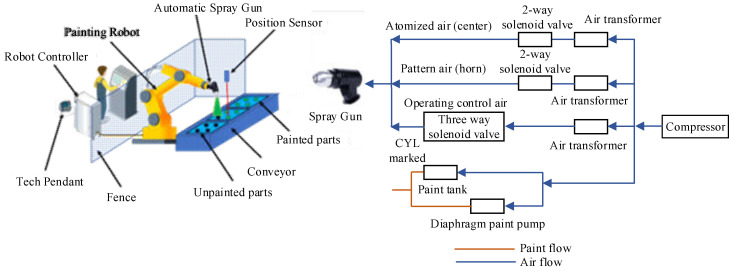
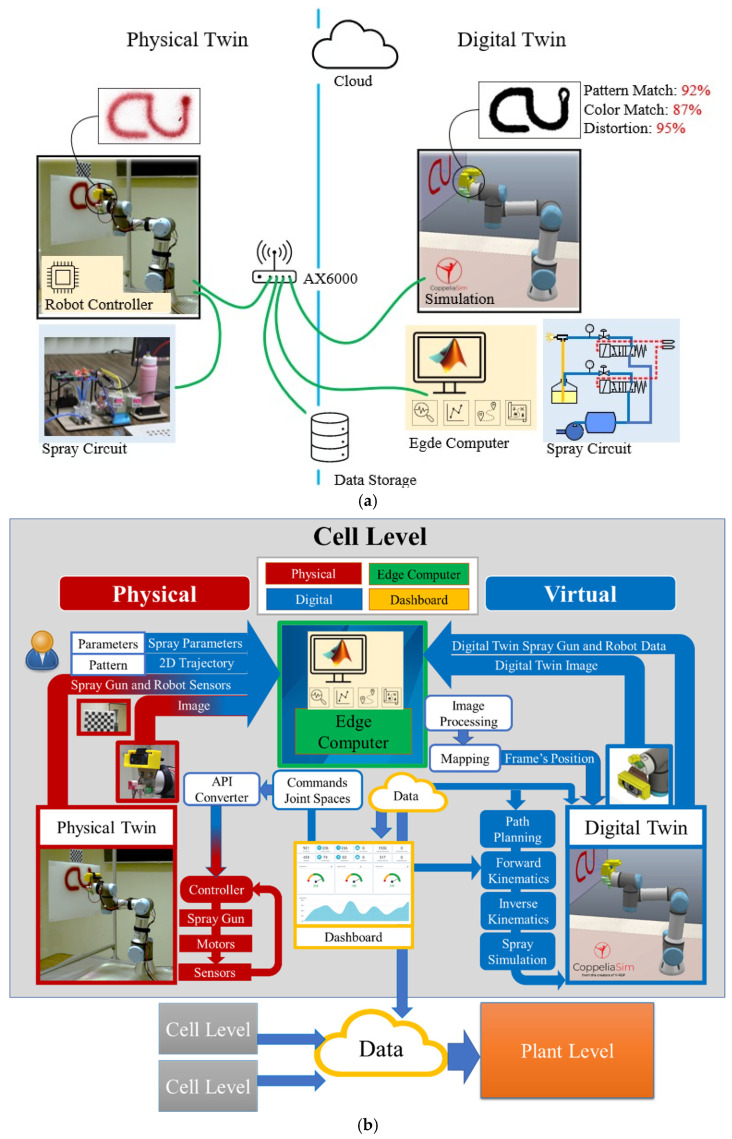
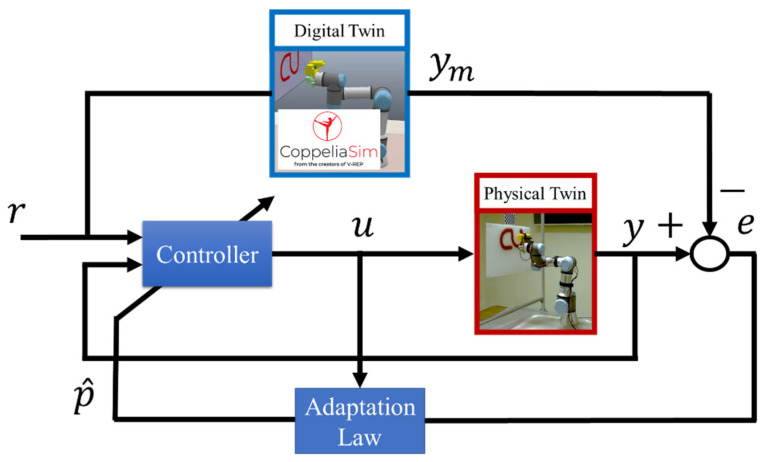
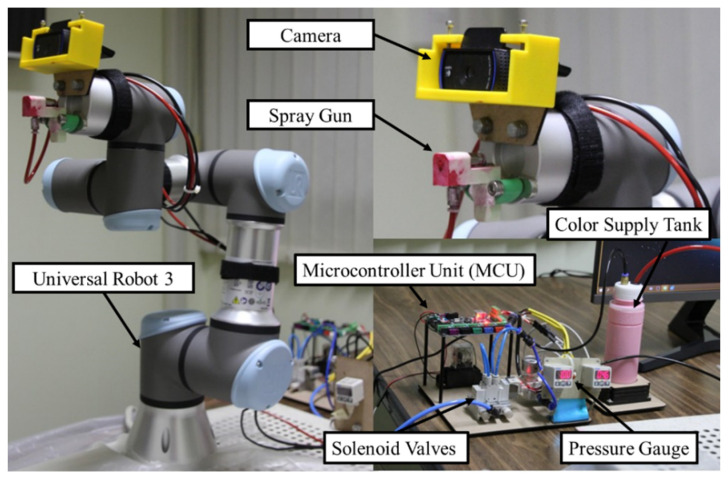
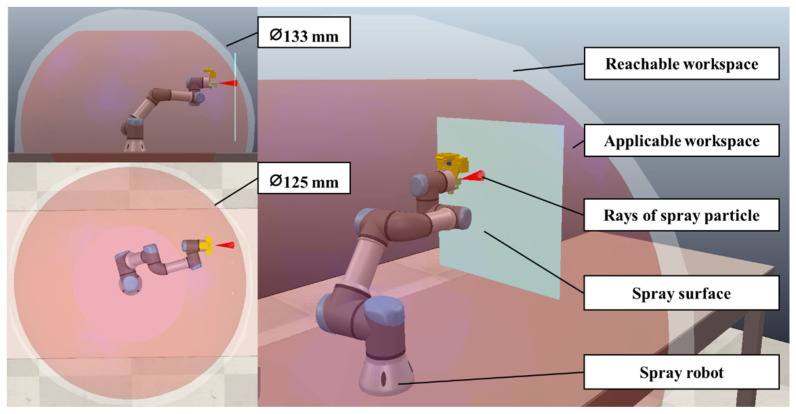
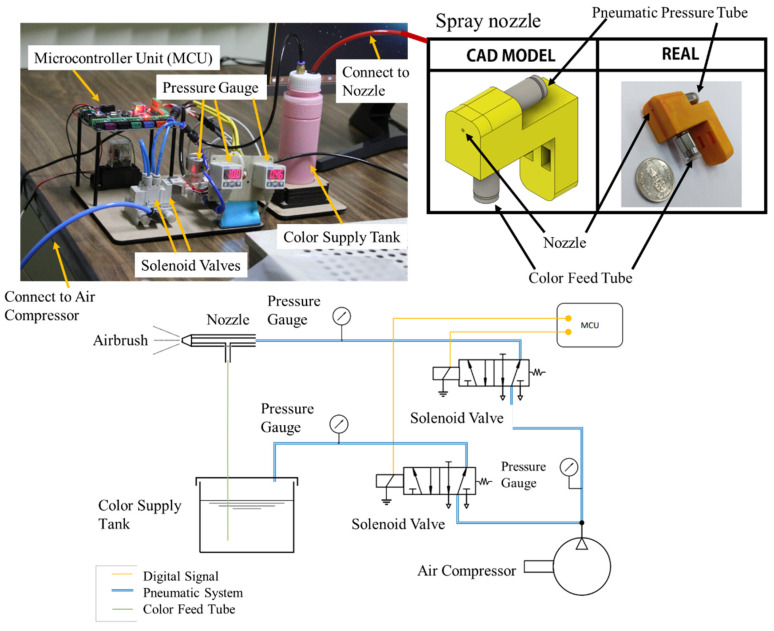
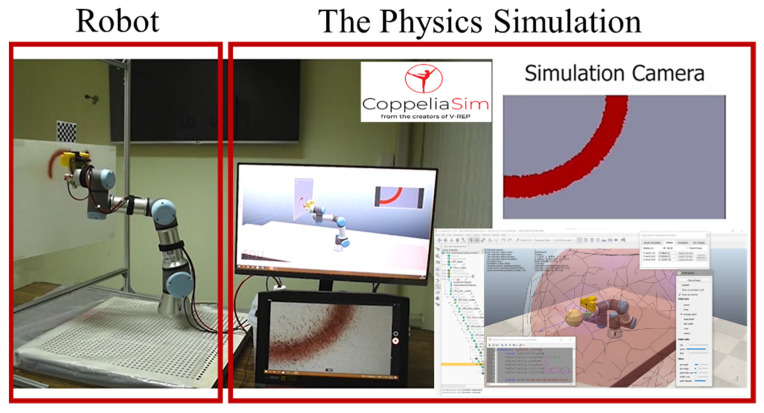
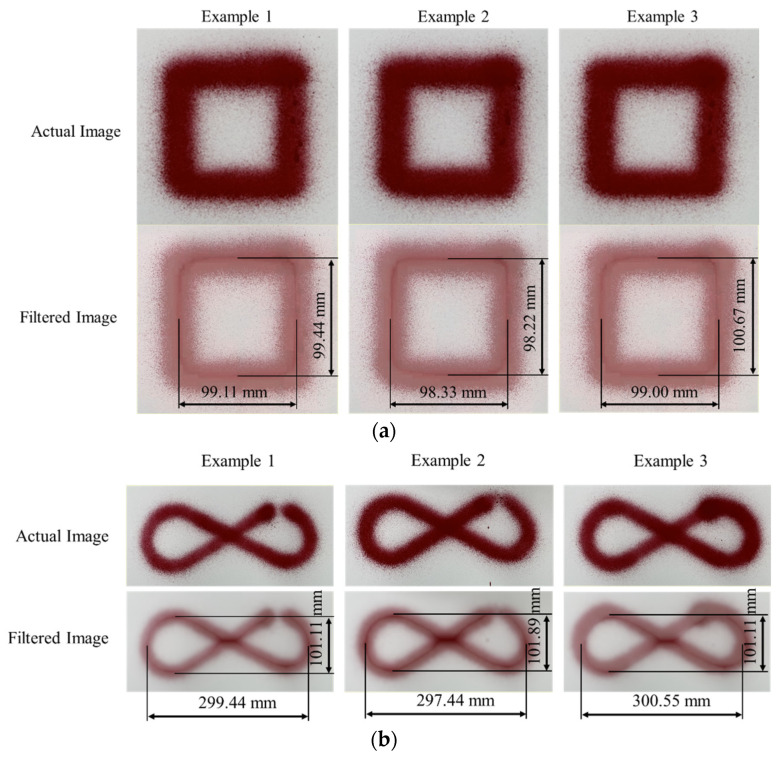
A collaborative painting robot that can be used as an alternative to workers has been developed using a digital twin framework and its performance was demonstrated experimentally. The digital twin of the automatic painting robot simulates the entire process and estimates the paint result before the real execution. An operator can view the simulated process and result with an option to either confirm or cancel the task. If the task is accepted, the digital twin generates all the parameters, including the end effector trajectory of the robot, the material flow to the collaborative robot, and a spray mechanism. This ability means that the painting process can be practiced in a virtual environment to decrease set costs, waste, and time, all of which are highly demanded in single-item production. In this study, the screen was fixtureless and, thus, a camera was used to capture it in a physical environment, which was further analyzed to determine its pose. The digital twin then builds the screen in real-time in a virtual environment. The communication between the physical and digital twins is bidirectional in this scenario. An operator can design a painting pattern, such as a basic shape and/or letter, along with its size and paint location, in the resulting procedure. The digital twin then generates the simulation and expected painting result using the physical twin's screen pose. The painting results show that the root mean square error (RMSE) of the painting is less than 1.5 mm and the standard deviation of RMSE is less than 0.85 mm. Additionally, the initial benefits of the technique include lower setup costs, waste, and time, as well as an easy-to-use operating procedure. More benefits are expected from the digital twin framework, such as the ability of the digital twin to (1) find a solution when a fault arises, (2) refine the control or optimize the operation, and (3) plan using historic data.
一种使用数字孪生框架开发的可替代工人的协作绘画机器人,其性能已通过实验进行了验证。自动绘画机器人的数字孪生模拟了整个过程,并在实际执行之前估算了油漆结果。操作员可以查看模拟过程和结果,并选择确认或取消任务。如果任务被接受,数字孪生将生成所有参数,包括机器人的末端执行器轨迹、协作机器人的材料流和喷涂机构。这种能力意味着可以在虚拟环境中练习绘画过程,以降低单件生产中对设置成本、浪费和时间的要求。在本研究中,屏幕是无夹具的,因此使用相机在物理环境中捕获它,然后进一步分析以确定其位置。然后,数字孪生在虚拟环境中实时构建屏幕。在这种情况下,物理和数字孪生之间的通信是双向的。操作员可以在最终的程序中设计绘画模式,例如基本形状和/或字母,以及其大小和油漆位置。然后,数字孪生使用物理孪生的屏幕位置生成模拟和预期的绘画结果。绘画结果表明,绘画的均方根误差(RMSE)小于 1.5 毫米,RMSE 的标准差小于 0.85 毫米。此外,该技术的初始优势包括降低设置成本、浪费和时间,以及易于使用的操作程序。数字孪生框架还具有其他优势,例如数字孪生可以(1)在出现故障时找到解决方案,(2)改进控制或优化操作,以及(3)使用历史数据进行规划。