Wang Shuangyi, Wang Kehao, Tang Ruijie, Qiao Jingzhe, Liu Hongbin, Hou Zeng-Guang
State Key Laboratory of Management and Control for Complex SystemsInstitute of Automation, Chinese Academy of Sciences Beijing 100190 China.
Beijing Advanced Innovation Center for Biomedical Engineering, Key Laboratory for Biomechanics and Mechanobiology of Ministry of Education, School of Biological Science and Medical EngineeringBeihang University Beijing 100191 China.
IEEE Trans Med Robot Bionics. 2020 Nov 6;3(1):289-293. doi: 10.1109/TMRB.2020.3036461. eCollection 2021 Feb.
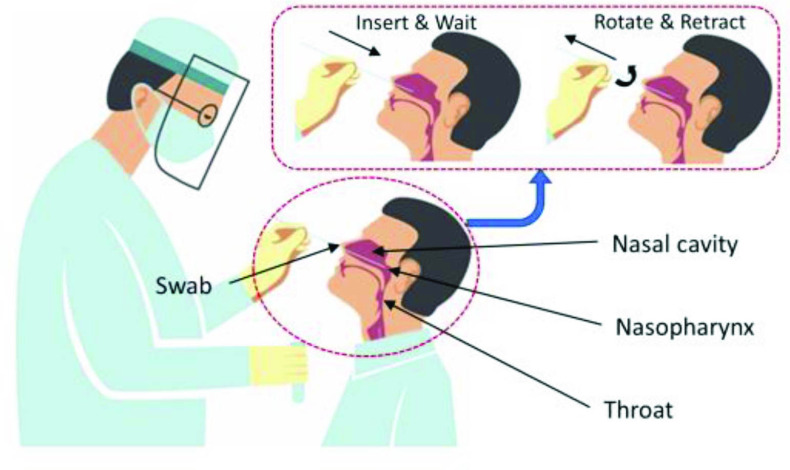
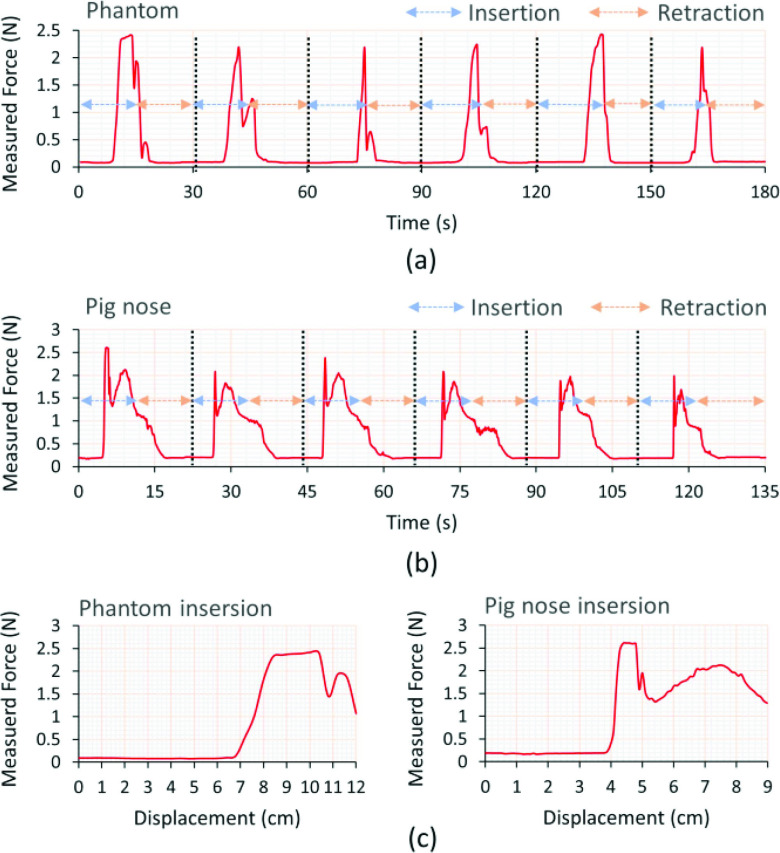
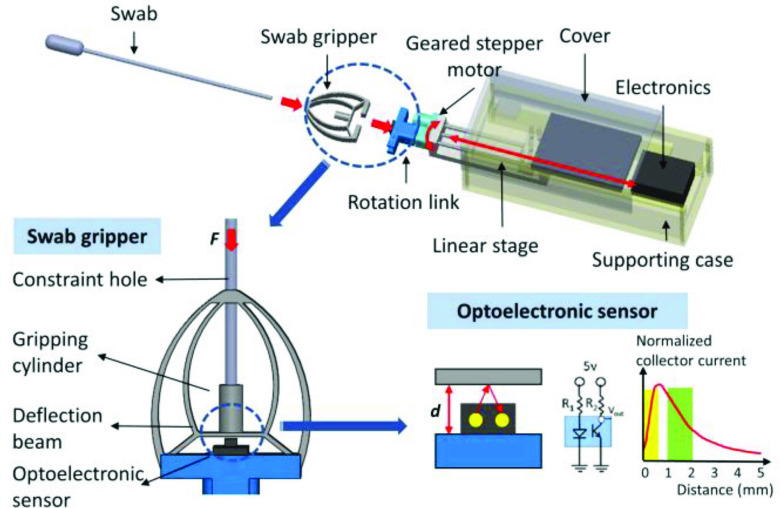
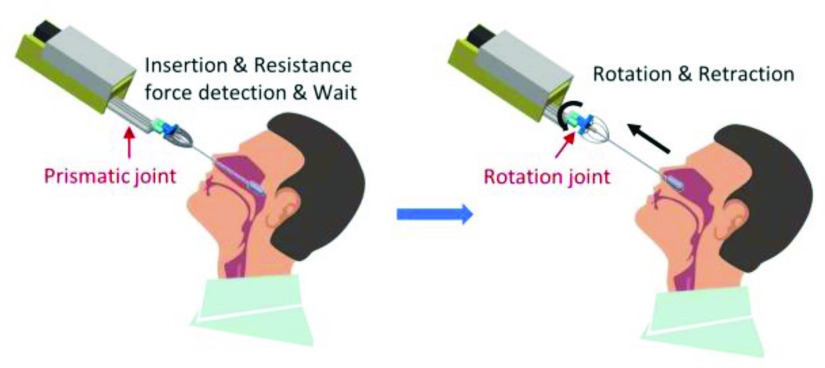
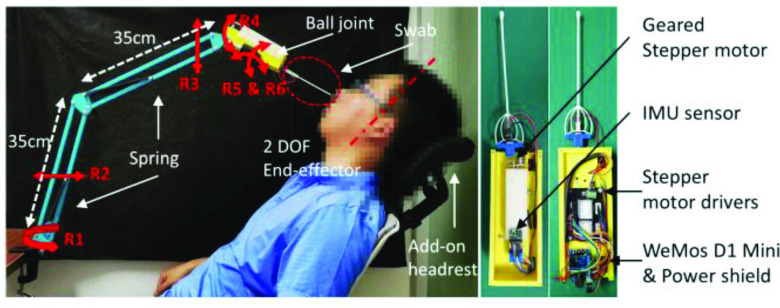
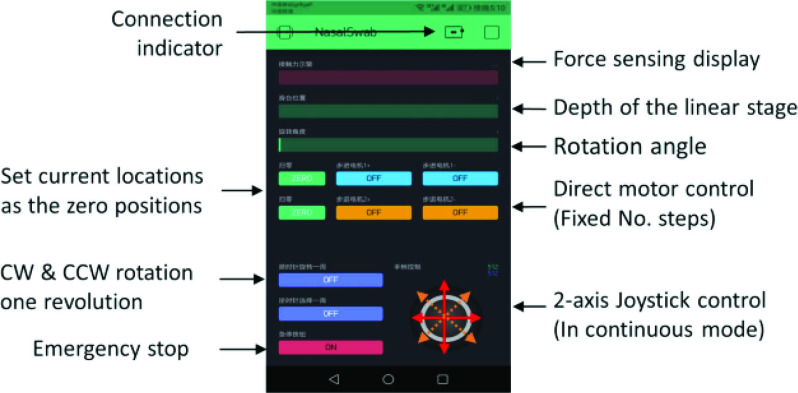
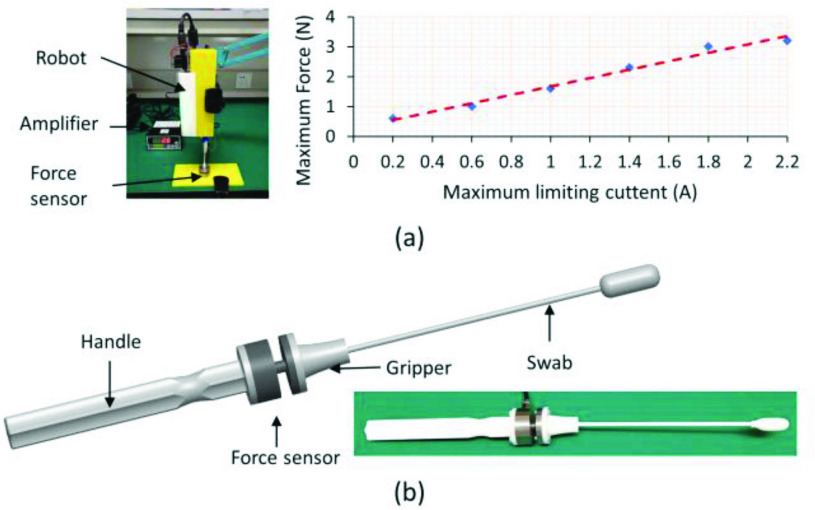
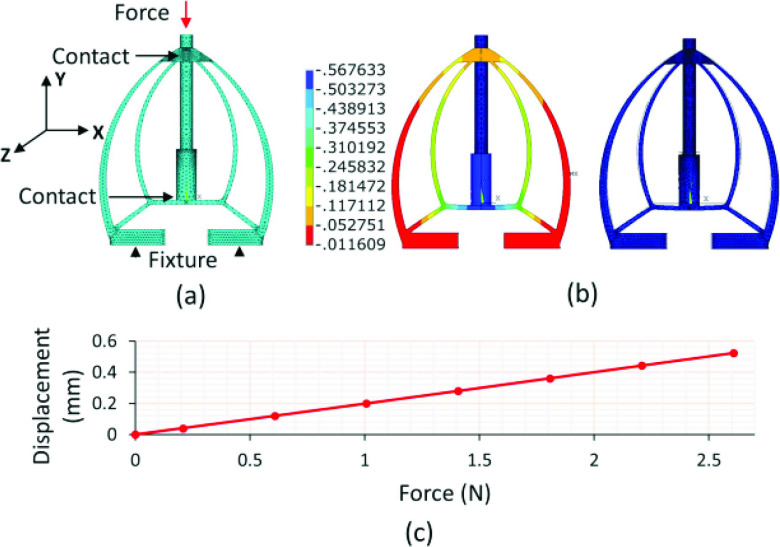
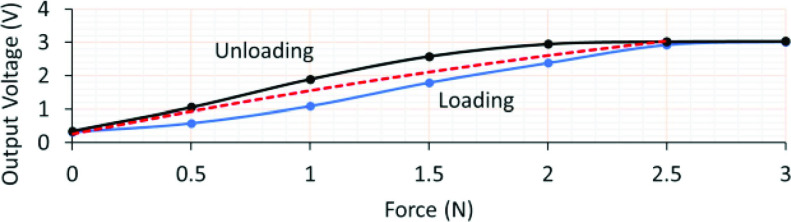
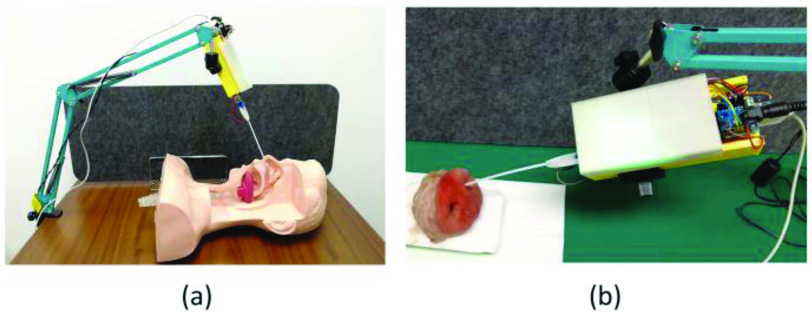
Nasopharyngeal (NP) swab sampling is an effective approach for the diagnosis of coronavirus disease 2019 (COVID-19). Medical staffs carrying out the task of collecting NP specimens are in close contact with the suspected patient, thereby posing a high risk of cross-infection. We propose a low-cost miniature robot that can be easily assembled and remotely controlled. The system includes an active end-effector, a passive positioning arm, and a detachable swab gripper with integrated force sensing capability. The cost of the materials for building this robot is 55 USD and the total weight of the functional part is 0.23kg. The design of the force sensing swab gripper was justified using Finite Element (FE) modeling and the performances of the robot were validated with a simulation phantom and three pig noses. FE analysis indicated a 0.5mm magnitude displacement of the gripper's sensing beam, which meets the ideal detecting range of the optoelectronic sensor. Studies on both the phantom and the pig nose demonstrated the successful operation of the robot during the collection task. The average forces were found to be 0.35N and 0.68N, respectively. It is concluded that the proposed robot is promising and could be further developed to be used in vivo.
鼻咽拭子采样是诊断2019冠状病毒病(COVID-19)的一种有效方法。执行采集鼻咽标本任务的医护人员与疑似患者密切接触,因此存在很高的交叉感染风险。我们提出了一种低成本的微型机器人,它易于组装且可远程控制。该系统包括一个主动末端执行器、一个被动定位臂以及一个具有集成力传感能力的可拆卸拭子夹。制造这个机器人的材料成本为55美元,功能部件的总重量为0.23千克。使用有限元(FE)建模验证了力传感拭子夹的设计,并通过模拟模型和三个猪鼻子对机器人的性能进行了验证。有限元分析表明,夹爪传感梁的位移量为0.5毫米,符合光电传感器的理想检测范围。对模型和猪鼻子的研究均表明,该机器人在采集任务中运行成功。平均力分别为0.35牛和0.68牛。结论是,所提出的机器人具有前景,可以进一步开发用于体内检测。