Hofstetter Lorne W, Hadley Rock, Merrill Robb, Pham Huy, Fine Gabriel C, Parker Dennis L
Department of Radiology and Imaging Sciences, University of Utah School of Medicine, 30 North 1900 East #1A071, Salt Lake City, Utah, 84132, USA.
Commun Eng. 2022;1. doi: 10.1038/s44172-022-00001-y. Epub 2022 May 26.
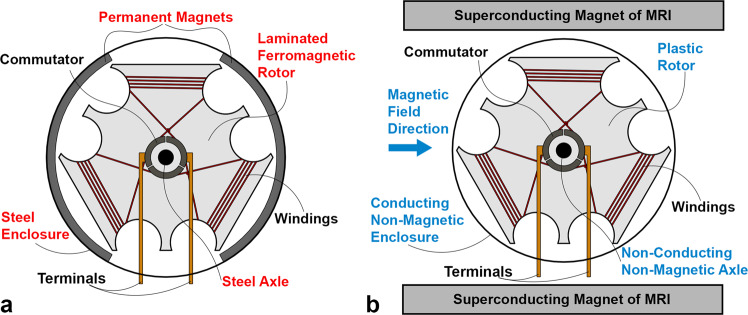
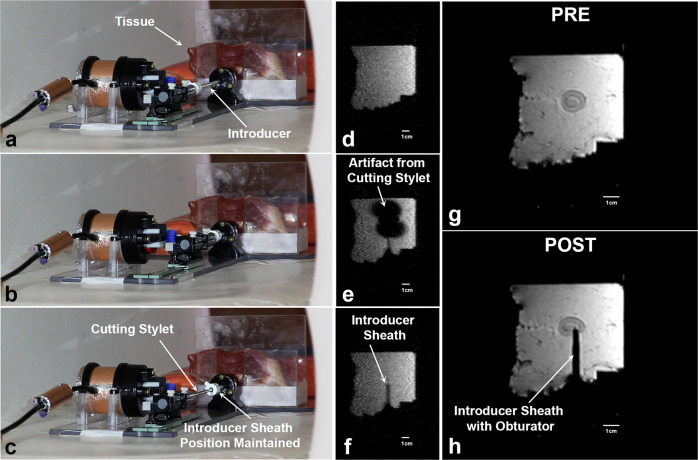
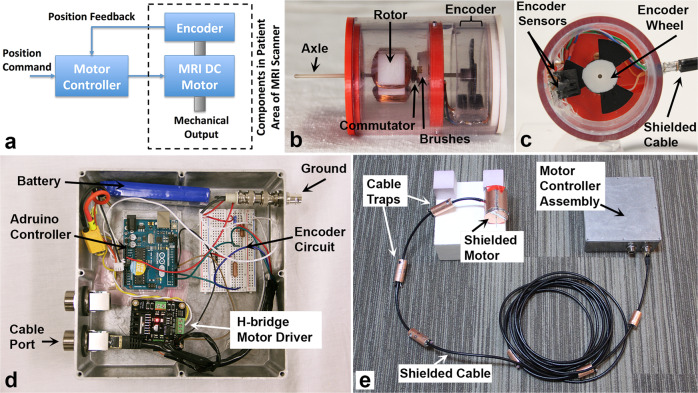
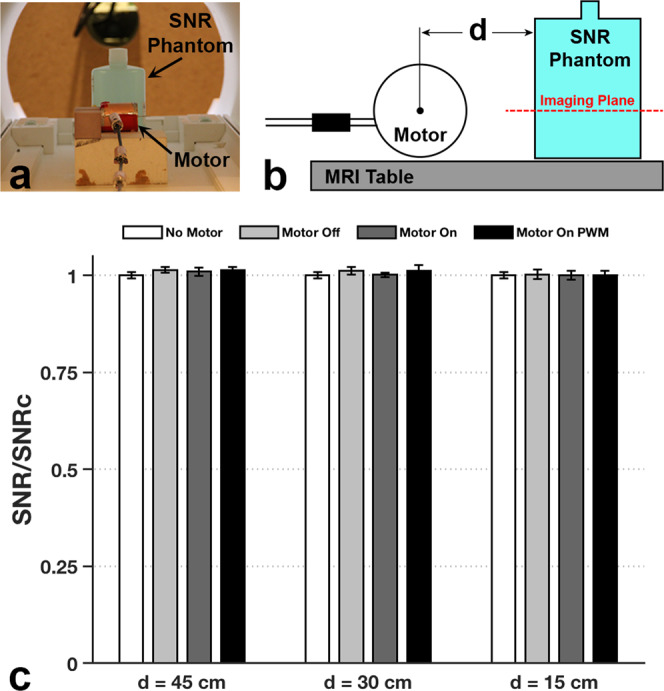
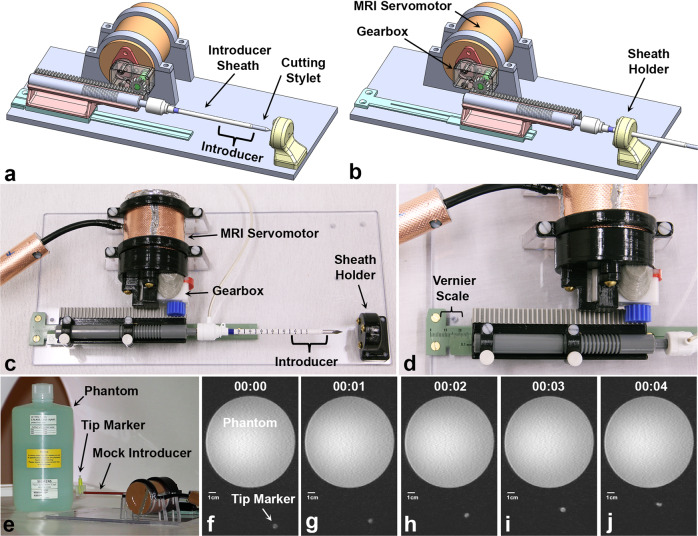
The soft-tissue imaging capabilities of magnetic resonance imaging (MRI) combined with high precision robotics has the potential to improve the precision and safety of a wide range of image-guided medical procedures. However, functional MRI-compatible robotics have not yet been realized in part because conventional electromagnetic servomotors can become dangerous projectiles near the strong magnetic field of an MRI scanner. Here we report an electromagnetic servomotor constructed from non-magnetic components, where high-torque and controlled rotary actuation is produced via interaction between electrical current in the servomotor armature and the magnetic field generated by the superconducting magnet of the MRI scanner itself. Using this servomotor design, we then build and test an MRI-compatible robot which can achieve the linear forces required to insert a large-diameter biopsy instrument in tissue during simultaneous MRI. Our electromagnetic servomotor can be safely operated (while imaging) in the patient area of a 3 Tesla clinical MRI scanner.
磁共振成像(MRI)的软组织成像能力与高精度机器人技术相结合,有可能提高各种图像引导医疗程序的精度和安全性。然而,功能磁共振成像兼容的机器人技术尚未实现,部分原因是传统的电磁伺服电机在MRI扫描仪的强磁场附近可能会成为危险的抛射物。在此,我们报告一种由非磁性部件构成的电磁伺服电机,其中通过伺服电机电枢中的电流与MRI扫描仪自身超导磁体产生的磁场之间的相互作用,产生高扭矩和可控的旋转驱动。利用这种伺服电机设计,我们随后制造并测试了一种MRI兼容机器人,该机器人能够在同步MRI过程中产生将大口径活检器械插入组织所需的线性力。我们的电磁伺服电机能够在3特斯拉临床MRI扫描仪的患者区域安全运行(同时进行成像)。