Stoianovici Dan, Song Danny, Petrisor Doru, Ursu Daniel, Mazilu Dumitru, Muntener Michael, Schar Michael, Patriciu Alexandru
Urology Robotics, Johns Hopkins Medicine, Baltimore, MD 21224, USA.
Minim Invasive Ther Allied Technol. 2007;16(4):241-8. doi: 10.1080/13645700701520735.
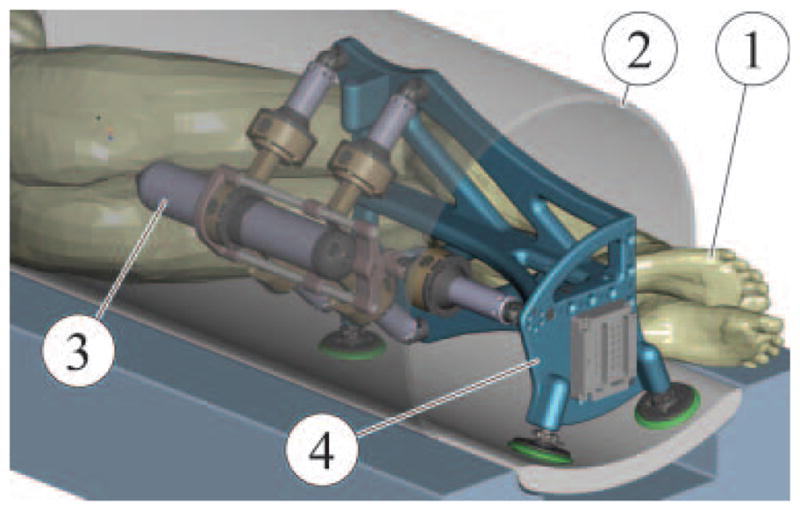
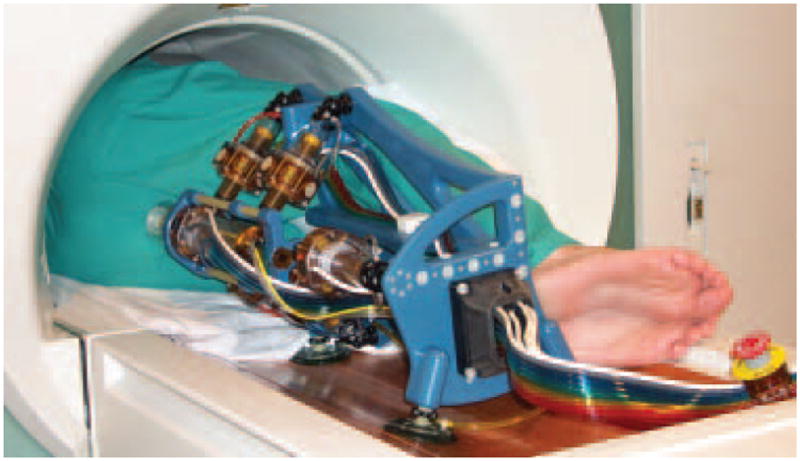
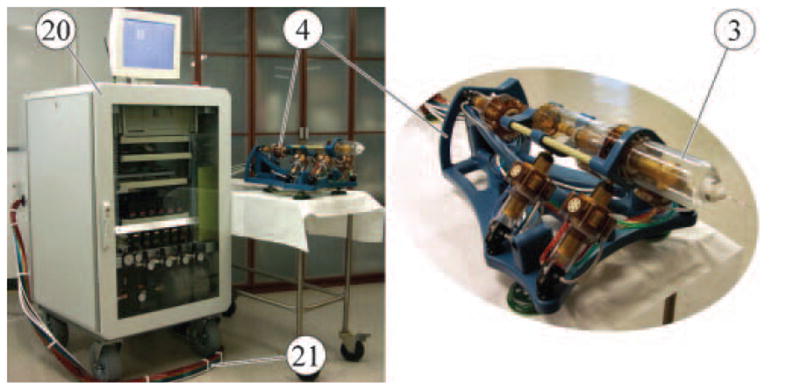
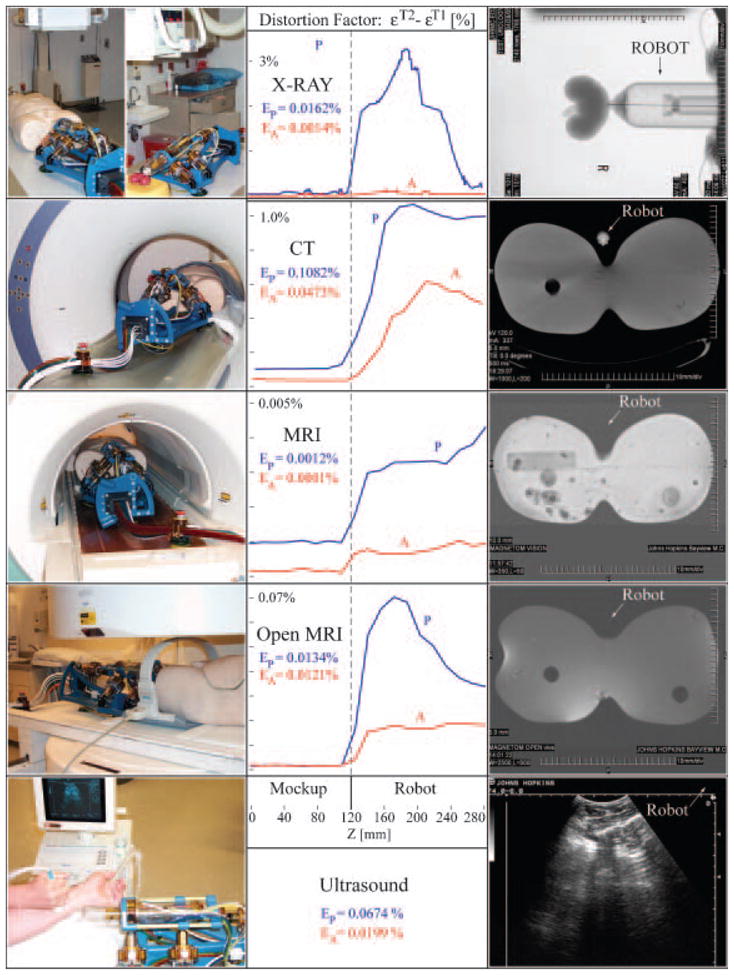
The paper reports an important achievement in MRI instrumentation, a pneumatic, fully actuated robot located within the scanner alongside the patient and operating under remote control based on the images. Previous MRI robots commonly used piezoelectric actuation limiting their compatibility. Pneumatics is an ideal choice for MRI compatibility because it is decoupled from electromagnetism, but pneumatic actuators were hardly controllable. This achievement was possible due to a recent technology breakthrough, the invention of a new type of pneumatic motor, PneuStep 1, designed for the robot reported here with uncompromised MRI compatibility, high-precision, and medical safety. MrBot is one of the "MRI stealth" robots today (the second is described in this issue by Zangos et al.). Both of these systems are also multi-imager compatible, being able to operate with the imager of choice or cross-imaging modalities. For MRI compatibility the robot is exclusively constructed of nonmagnetic and dielectric materials such as plastics, ceramics, crystals, rubbers and is electricity free. Light-based encoding is used for feedback, so that all electric components are distally located outside the imager's room. MRI robots are modern, digital medical instruments in line with advanced imaging equipment and methods. These allow for accessing patients within closed bore scanners and performing interventions under direct (in scanner) imaging feedback. MRI robots could allow e.g. to biopsy small lesions imaged with cutting edge cancer imaging methods, or precisely deploy localized therapy at cancer foci. Our robot is the first to show the feasibility of fully automated in-scanner interventions. It is customized for the prostate and operates transperineally for needle interventions. It can accommodate various needle drivers for different percutaneous procedures such as biopsy, thermal ablations, or brachytherapy. The first needle driver is customized for fully automated low-dose radiation seed brachytherapy. This paper gives an introduction to the challenges of MRI robot compatibility and presents the solutions adopted in making the MrBot. Its multi-imager compatibility and other preclinical tests are included. The robot shows the technical feasibility of MRI-guided prostate interventions, yet its clinical utility is still to be determined.
本文报道了磁共振成像(MRI)仪器领域的一项重要成果,即一种气动全驱动机器人,它位于扫描仪内患者身旁,并根据图像进行远程控制操作。以往的MRI机器人通常采用压电驱动,这限制了它们的兼容性。气动是MRI兼容性的理想选择,因为它与电磁无关,但气动执行器难以控制。这一成果得益于近期的一项技术突破,即一种新型气动马达PneuStep 1的发明,该马达专为本文报道的机器人设计,具有不妥协的MRI兼容性、高精度和医疗安全性。MrBot是现今“MRI隐身”机器人之一(本期另一款由赞戈斯等人描述)。这两种系统也都具有多成像仪兼容性,能够与选定的成像仪或交叉成像模式配合使用。为实现MRI兼容性,该机器人完全由塑料、陶瓷、晶体、橡胶等非磁性和介电材料制成,且无电。基于光的编码用于反馈,以便所有电气部件都位于成像仪房间外的远端。MRI机器人是与先进成像设备和方法相匹配的现代数字医疗仪器。这些仪器能够进入封闭孔径扫描仪内的患者体内,并在直接(扫描仪内)成像反馈下进行干预。MRI机器人例如可以对采用前沿癌症成像方法成像的小病变进行活检,或在癌灶精确部署局部治疗。我们的机器人是首个展示扫描仪内完全自动化干预可行性的机器人。它是为前列腺定制的,经会阴操作进行针干预。它可以容纳各种用于不同经皮手术(如活检、热消融或近距离放射治疗)的针驱动器。首个针驱动器专为全自动低剂量放射性粒子近距离放射治疗定制。本文介绍了MRI机器人兼容性方面的挑战,并展示了在制造MrBot时所采用的解决方案。还包括其多成像仪兼容性和其他临床前测试。该机器人展示了MRI引导前列腺干预的技术可行性,但其临床实用性仍有待确定。