State Key Laboratory of Virtual Reality Technology and Systems, Beihang University, Beijing 100191, China.
Peng Cheng Laboratory, Shenzhen 518055, China.
Sensors (Basel). 2023 Feb 21;23(5):2377. doi: 10.3390/s23052377.
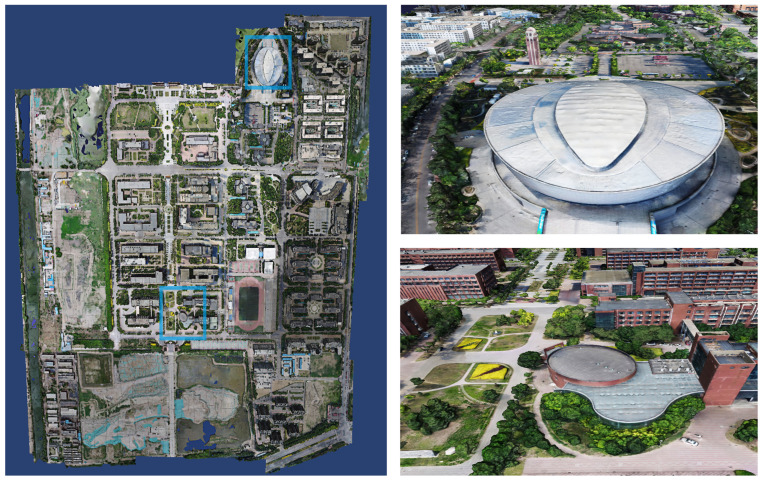
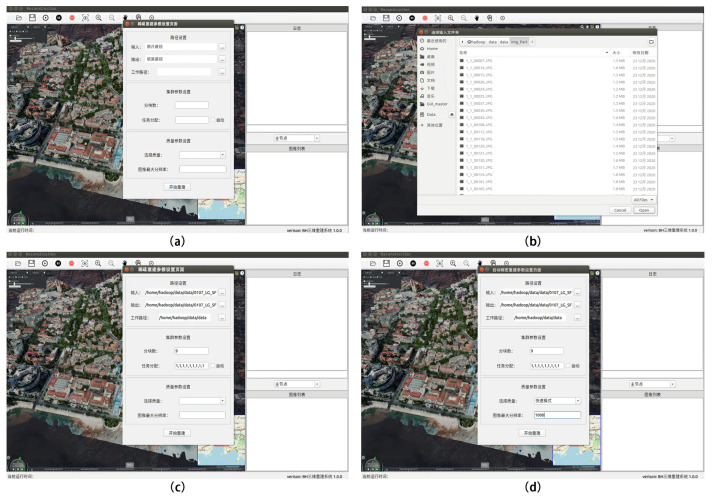
The reconstruction of realistic large-scale 3D scene models using aerial images or videos has significant applications in smart cities, surveying and mapping, the military and other fields. In the current state-of-the-art 3D-reconstruction pipeline, the massive scale of the scene and the enormous amount of input data are still considerable obstacles to the rapid reconstruction of large-scale 3D scene models. In this paper, we develop a professional system for large-scale 3D reconstruction. First, in the sparse point-cloud reconstruction stage, the computed matching relationships are used as the initial camera graph and divided into multiple subgraphs by a clustering algorithm. Multiple computational nodes execute the local structure-from-motion (SFM) technique, and local cameras are registered. Global camera alignment is achieved by integrating and optimizing all local camera poses. Second, in the dense point-cloud reconstruction stage, the adjacency information is decoupled from the pixel level by red-and-black checkerboard grid sampling. The optimal depth value is obtained using normalized cross-correlation (NCC). Additionally, during the mesh-reconstruction stage, feature-preserving mesh simplification, Laplace mesh-smoothing and mesh-detail-recovery methods are used to improve the quality of the mesh model. Finally, the above algorithms are integrated into our large-scale 3D-reconstruction system. Experiments show that the system can effectively improve the reconstruction speed of large-scale 3D scenes.
使用航空图像或视频重建逼真的大规模 3D 场景模型在智慧城市、测绘、军事等领域具有重要的应用。在当前的最先进的 3D 重建管道中,场景的大规模和输入数据的巨大数量仍然是快速重建大规模 3D 场景模型的相当大的障碍。在本文中,我们开发了一个专业的大规模 3D 重建系统。首先,在稀疏点云重建阶段,计算出的匹配关系被用作初始相机图,并通过聚类算法将其分为多个子图。多个计算节点执行局部结构从运动(SFM)技术,并注册局部相机。通过集成和优化所有局部相机姿态来实现全局相机对准。其次,在密集点云重建阶段,通过红黑棋盘格采样将邻接信息从像素级解耦。使用归一化互相关(NCC)获得最佳深度值。此外,在网格重建阶段,使用特征保持网格简化、拉普拉斯网格平滑和网格细节恢复方法来提高网格模型的质量。最后,将上述算法集成到我们的大规模 3D 重建系统中。实验表明,该系统可以有效地提高大规模 3D 场景的重建速度。