Center for Plastic & Reconstructive Surgery, Department of Stomatology, Zhejiang Provincial People's Hospital, Affiliated People's Hospital, Hangzhou Medical College, Hangzhou, Zhejiang, China.
Department of Stomatology, Zhejiang Provincial People's Hospital, Affiliated People's Hospital, Hangzhou Medical College, Hangzhou, Zhejiang, China.
BMC Oral Health. 2023 Mar 28;23(1):179. doi: 10.1186/s12903-023-02873-8.
To compare the accuracy of dental implant placement using a novel dental implant robotic system (THETA) and a dynamic navigation system (Yizhimei) by a vitro model experiment.
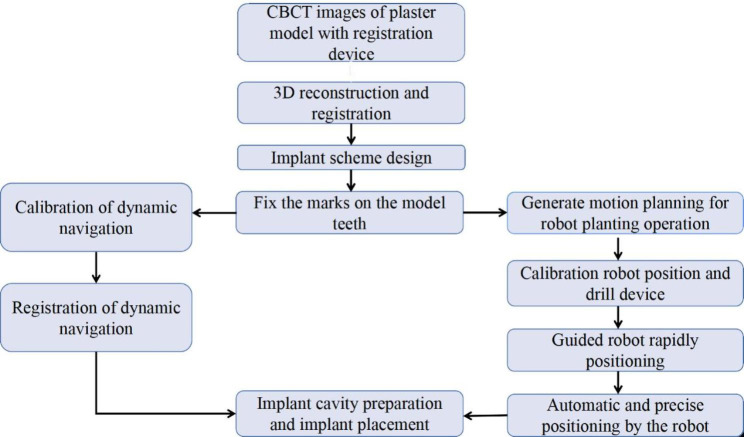
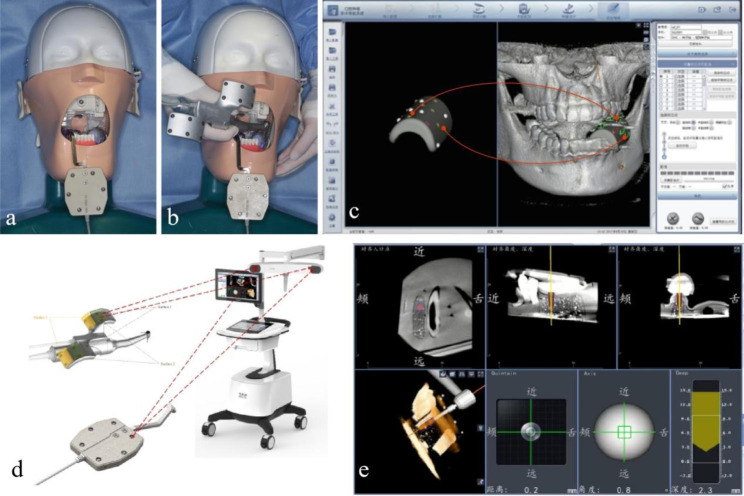
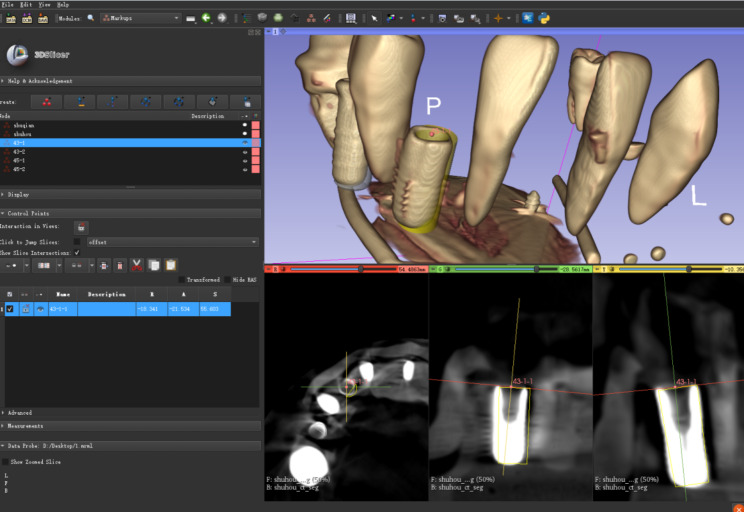
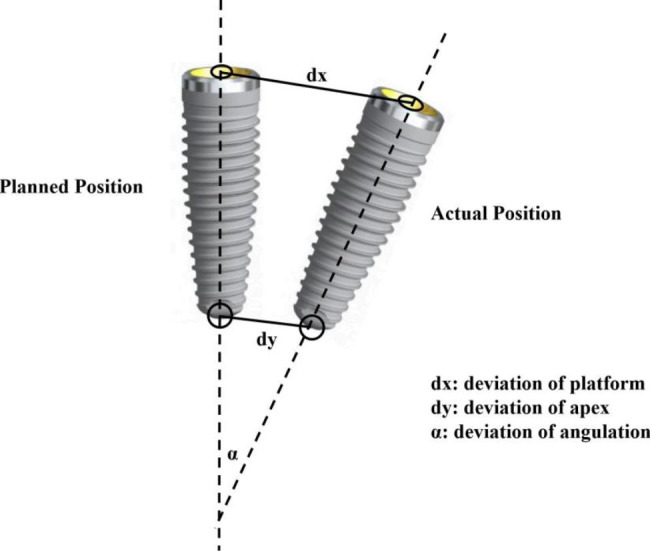
10 partially edentulous jaws models were included in this study, and 20 sites were randomly assigned into two groups: the dental implant robotic system (THETA) group and a dynamic navigation system (Yizhimei) group. 20 implants were placed in the defects according to each manufacturer's protocol respectively. The implant platform, apex and angle deviations were measured by fusion of the preoperative design and the actual postoperative cone-beam computed tomography (CBCT) using 3D Slicer software. Data were analyzed by t - test and Mann-Whitney U test, p < 0.05 was considered statistically significant.
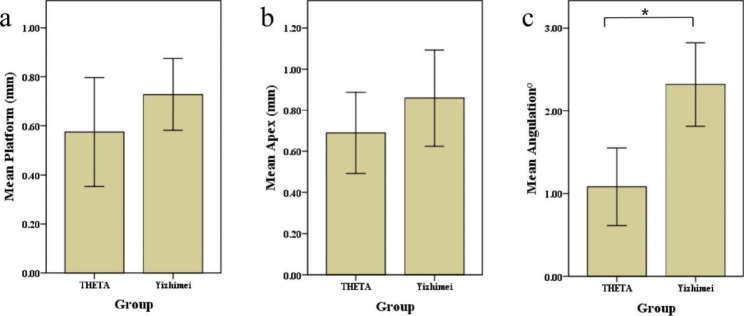
A total of 20 implants were placed in 10 phantoms. The comparison deviation of implant platform, apex and angulation in THETA group were 0.58 ± 0.31 mm, 0.69 ± 0.28 mm, and 1.08 ± 0.66 respectively, while in Yizhimei group, the comparison deviation of implant platform, apex and angulation were 0.73 ± 0.20 mm, 0.86 ± 0.33 mm, and 2.32 ± 0.71 respectively. The angulation deviation in THETA group was significantly smaller than the Yizhimei group, and there was no significant difference in the deviation of the platform and apex of the implants placed using THETA and Yizhimei, respectively.
The implant positioning accuracy of the robotic system, especially the angular deviation was superior to that of the dynamic navigation system, suggesting that the THETA robotic system could be a promising tool in dental implant surgery in the future. Further clinical studies are needed to evaluate the current results.
通过体外模型实验比较新型牙科植入物机器人系统(THETA)和动态导航系统(Yizhimei)在牙科植入物放置中的准确性。
本研究纳入 10 个部分缺牙颌模型,20 个位点随机分为两组:牙科植入物机器人系统(THETA)组和动态导航系统(Yizhimei)组。根据各制造商的方案,分别在缺陷部位植入 20 个种植体。使用 3D Slicer 软件融合术前设计和实际术后锥形束 CT(CBCT),测量种植体平台、根尖和角度偏差。采用 t 检验和 Mann-Whitney U 检验进行数据分析,p<0.05 为统计学差异。
总共在 10 个模型中放置了 20 个种植体。THETA 组种植体平台、根尖和角度偏差的比较偏差分别为 0.58±0.31mm、0.69±0.28mm 和 1.08±0.66mm,而 Yizhimei 组分别为 0.73±0.20mm、0.86±0.33mm 和 2.32±0.71mm。THETA 组的角度偏差明显小于 Yizhimei 组,而使用 THETA 和 Yizhimei 植入物的平台和根尖偏差无显著差异。
机器人系统的种植体定位精度,特别是角度偏差优于动态导航系统,提示 THETA 机器人系统未来可能成为牙科种植手术的一种有前途的工具。需要进一步的临床研究来评估当前的结果。