College of Automation, Nanjing University of Science & Technology, Xiaolingwei Street, Nanjing 210094, China.
Second Academy of Aerospace Science and Industry, Yongding Road, Beijing 100854, China.
Sensors (Basel). 2023 Jun 5;23(11):5343. doi: 10.3390/s23115343.
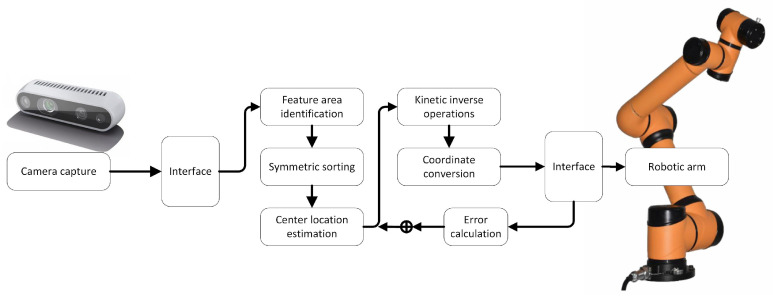
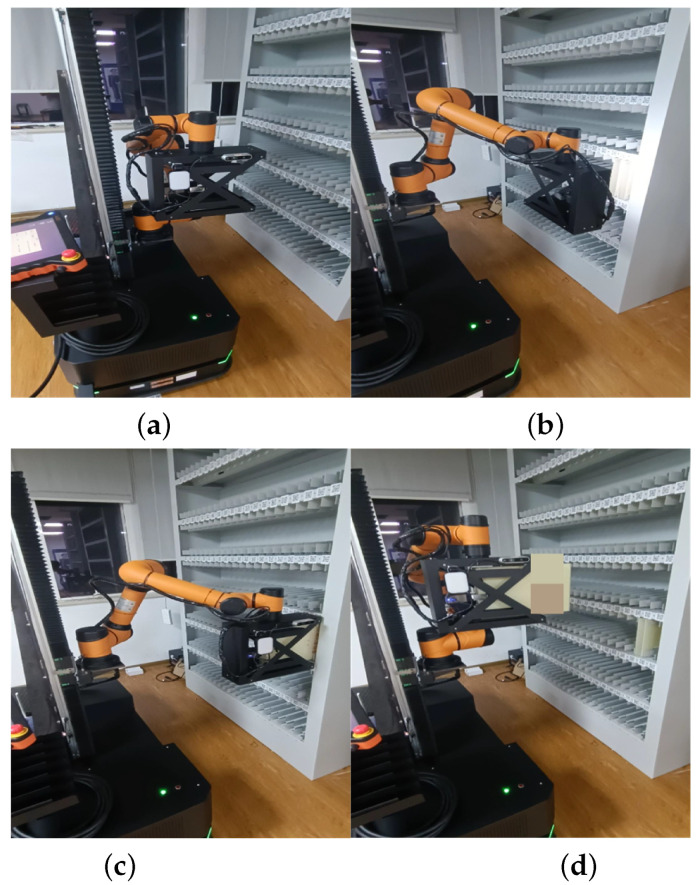
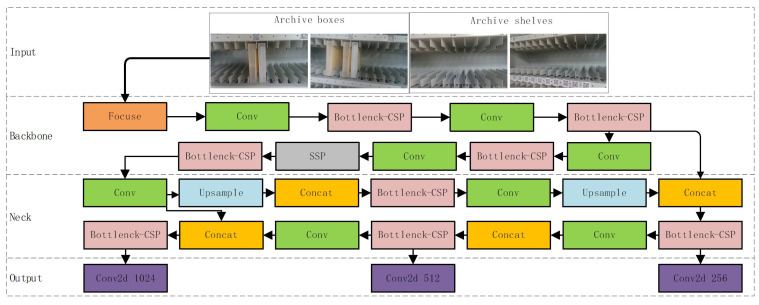
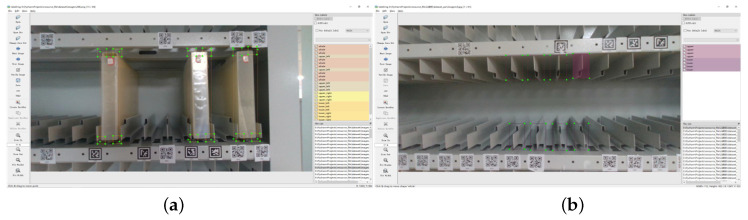
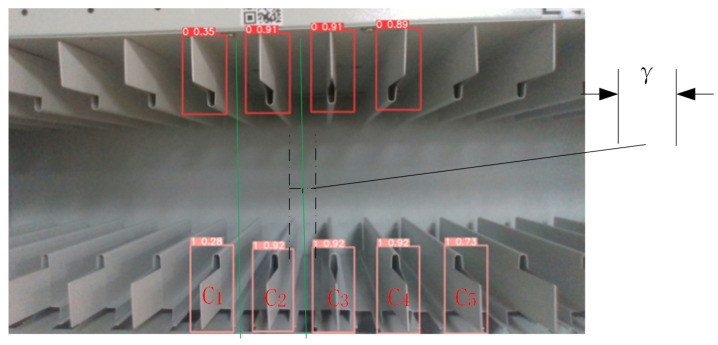
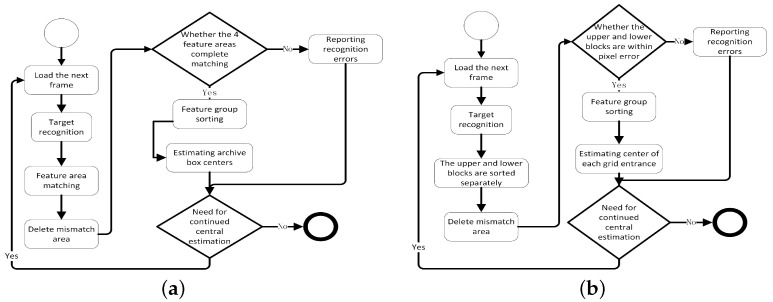
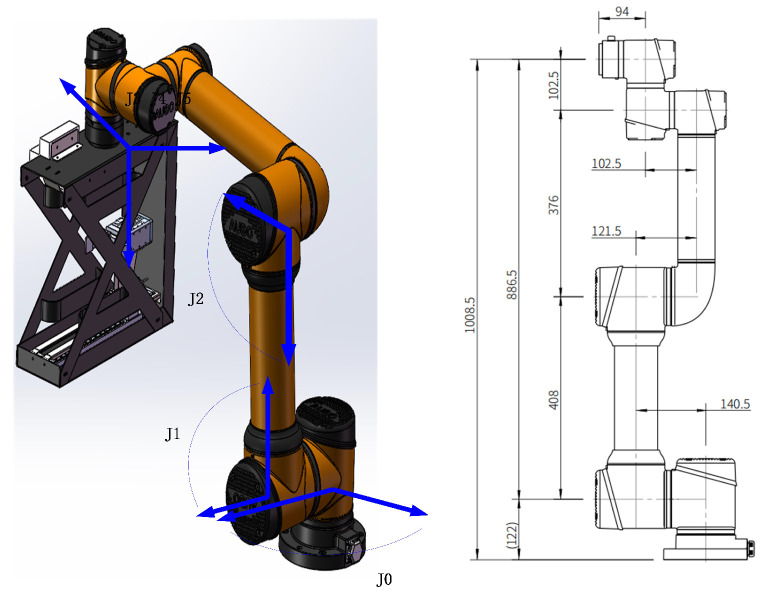
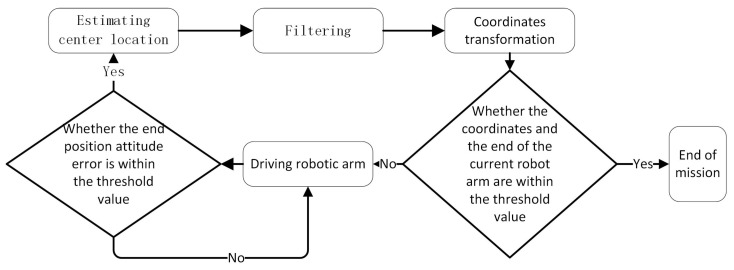
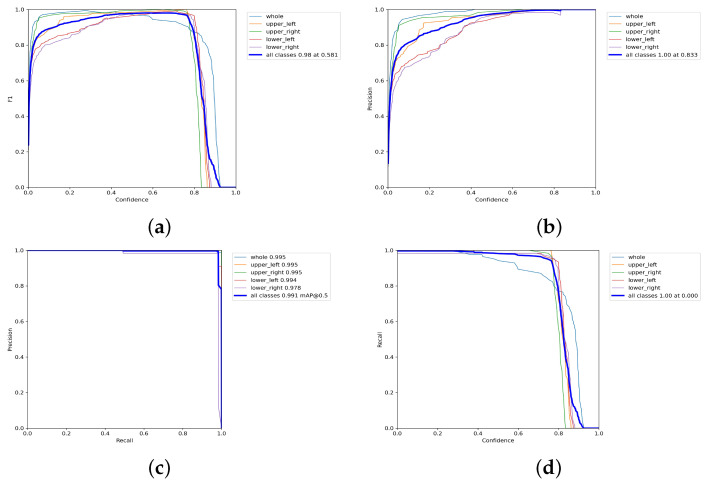
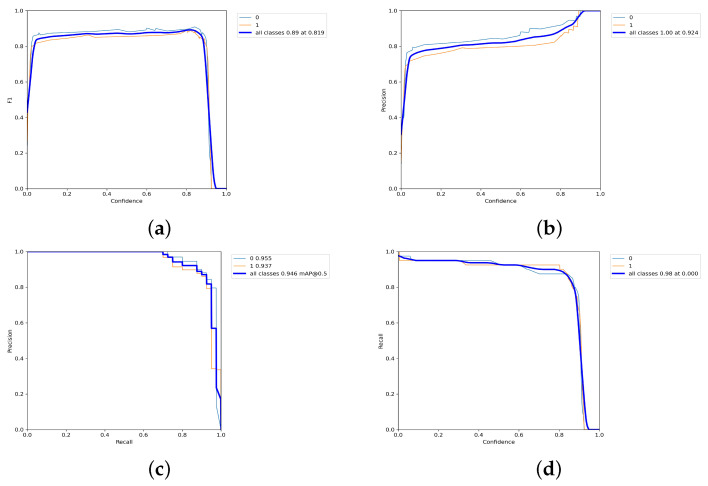
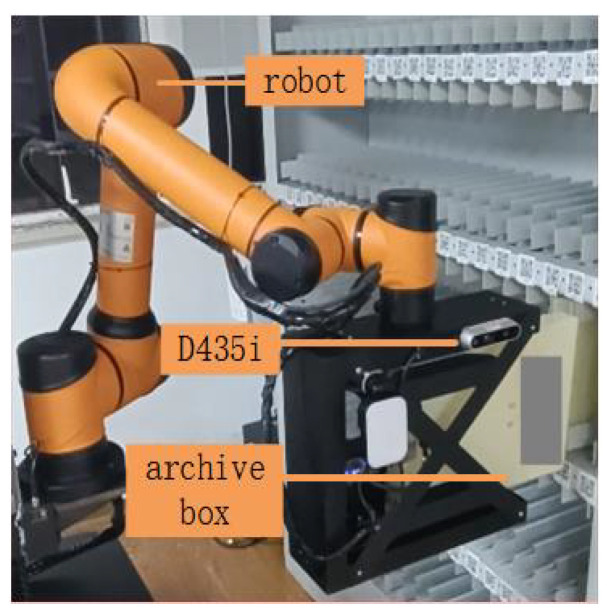
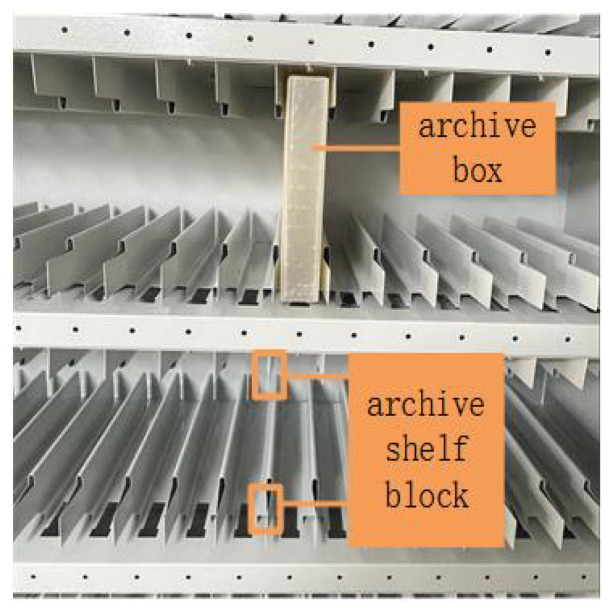
With increasing demand for efficient archive management, robots have been employed in paper-based archive management for large, unmanned archives. However, the reliability requirements of such systems are high due to their unmanned nature. To address this, this study proposes a paper archive access system with adaptive recognition for handling complex archive box access scenarios. The system comprises a vision component that employs the YOLOV5 algorithm to identify feature regions, sort and filter data, and to estimate the target center position, as well as a servo control component. This study proposes a servo-controlled robotic arm system with adaptive recognition for efficient paper-based archive management in unmanned archives. The vision part of the system employs the YOLOV5 algorithm to identify feature regions and to estimate the target center position, while the servo control part uses closed-loop control to adjust posture. The proposed feature region-based sorting and matching algorithm enhances accuracy and reduces the probability of shaking by 1.27% in restricted viewing scenarios. The system is a reliable and cost-effective solution for paper archive access in complex scenarios, and the integration of the proposed system with a lifting device enables the effective storage and retrieval of archive boxes of varying heights. However, further research is necessary to evaluate its scalability and generalizability. The experimental results demonstrate the effectiveness of the proposed adaptive box access system for unmanned archival storage. The system exhibits a higher storage success rate than existing commercial archival management robotic systems. The integration of the proposed system with a lifting device provides a promising solution for efficient archive management in unmanned archival storage. Future research should focus on evaluating the system's performance and scalability.
随着对高效档案管理的需求不断增加,机器人已被应用于无人值守的大型纸质档案管理中。然而,由于其无人值守的性质,对这些系统的可靠性要求很高。针对这一问题,本研究提出了一种具有自适应识别功能的纸质档案访问系统,用于处理复杂的档案盒访问场景。该系统包括一个视觉组件,该组件采用 YOLOV5 算法来识别特征区域,对数据进行分类和过滤,并估计目标中心位置,以及一个伺服控制组件。本研究提出了一种自适应识别的伺服控制机械臂系统,用于无人值守档案库中高效的纸质档案管理。系统的视觉部分采用 YOLOV5 算法识别特征区域,并估计目标中心位置,而伺服控制部分则使用闭环控制来调整姿势。所提出的基于特征区域的分类和匹配算法提高了准确性,并在受限观察场景中将抖动概率降低了 1.27%。该系统是复杂场景下纸质档案访问的可靠且具有成本效益的解决方案,并且将该系统与提升装置集成可以有效存储和检索不同高度的档案盒。然而,需要进一步研究来评估其可扩展性和通用性。实验结果证明了所提出的自适应档案盒访问系统在无人值守档案存储中的有效性。该系统的存储成功率高于现有的商业档案管理机器人系统。将所提出的系统与提升装置集成提供了一种用于无人值守档案存储中高效档案管理的有前途的解决方案。未来的研究应集中评估该系统的性能和可扩展性。