Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun 130033, China.
University of Chinese Academy of Sciences, Beijing 100049, China.
Sensors (Basel). 2023 Jun 30;23(13):6068. doi: 10.3390/s23136068.
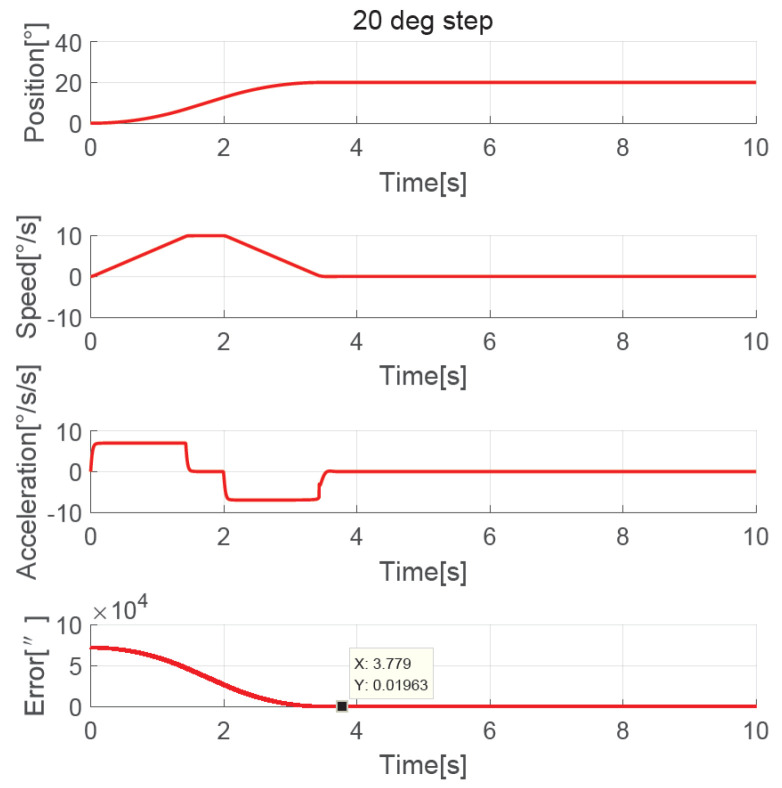
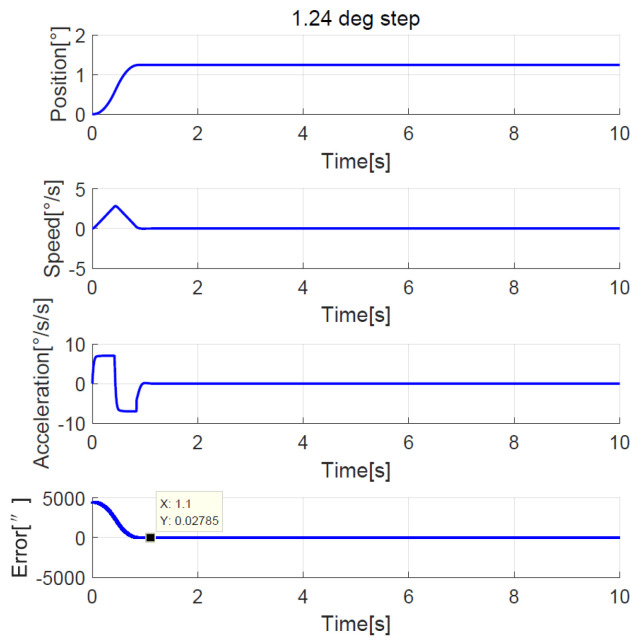
Linear active disturbance rejection control (LADRC) has been widely used to improve the tracking accuracy and anti-disturbance performance of telescope servo control under disturbances. However, the linear extended state observer (LESO) is sensitive to noise, and its bandwidth is limited by the resonant frequency of the telescope. To enhance the LARDC's ability to attenuate disturbances, a novel cascade anti-disturbance structure (NCADS) with LADRC on the outer speed loop and a nonlinear disturbance observer (NDOB) on the inner current loop is proposed. The NDOB compensates for the dominant disturbance through feedforwarding the q-axis current reference, and the LESO compensates for the residual disturbance on the outer speed loop. First, the NCADS is introduced in a three-closed-loop control framework of PMSM. Then, the design method of the controller for each loop and the NDOB are presented, the parameter-tuning method based on bandwidth is demonstrated, and the convergence of the NDOB is proved. Furthermore, to improve the searching and tracking efficiency of wide-field survey telescopes, the nonlinear tracking differentiator (NTD) was modified to plan the transition process of the position loop, which only needs to set the maximum speed and acceleration of the telescope. Finally, simulations and experiments were performed on a 2.5-m-wide field survey telescope. The experimental results verify that the proposed NCADS method has a better anti-disturbance performance and higher tracking precision than the conventional method, and the improved NTD method does not need to tune parameters and achieved a fast and smooth transition process of the position loop.
线性自抗扰控制(LADRC)已广泛应用于提高望远镜伺服控制在干扰下的跟踪精度和抗干扰性能。然而,线性扩张状态观测器(LESO)对噪声敏感,其带宽受望远镜谐振频率的限制。为了增强 LARDC 对干扰的衰减能力,提出了一种新的级联抗扰结构(NCADS),在外速度环中采用 LADRC,在内电流环中采用非线性干扰观测器(NDOB)。NDOB 通过前馈 q 轴电流参考来补偿主导干扰,LESO 补偿外速度环中的剩余干扰。首先,将 NCADS 引入到 PMSM 的三闭环控制框架中。然后,介绍了每个环的控制器和 NDOB 的设计方法,演示了基于带宽的参数整定方法,并证明了 NDOB 的收敛性。此外,为了提高大视场巡天望远镜的搜索和跟踪效率,对非线性跟踪微分器(NTD)进行了改进,以规划位置环的过渡过程,只需要设置望远镜的最大速度和加速度。最后,在 2.5 米宽视场巡天望远镜上进行了仿真和实验。实验结果验证了所提出的 NCADS 方法具有更好的抗干扰性能和更高的跟踪精度,改进的 NTD 方法不需要调整参数,并实现了位置环的快速平滑过渡过程。