InViLab, Faculty of Applied Engineering, University of Antwerp, 2000 Antwerp, Belgium.
Sensors (Basel). 2023 Jul 3;23(13):6126. doi: 10.3390/s23136126.
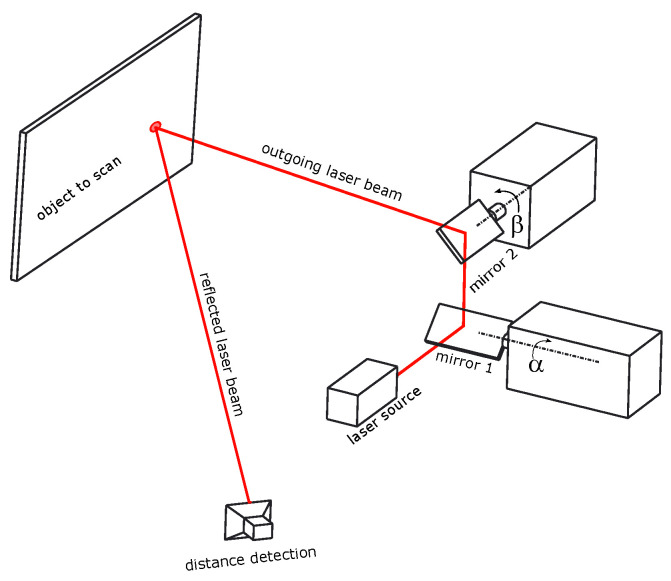
We propose a new paradigm for modelling and calibrating laser scanners with rotation symmetry, as is the case for lidars or for galvanometric laser systems with one or two rotating mirrors. Instead of bothering about the intrinsic parameters of a physical model, we use the geometric properties of the device to model it as a specific configuration of lines, which can be recovered by a line-data-driven procedure. Compared to universal data-driven methods that train general line models, our algebraic-geometric approach only requires a few measurements. We elaborate the case of a galvanometric laser scanner with two mirrors, that we model as a grid of hyperboloids represented by a grid of 3×3 lines. This provides a new type of look-up table, containing not more than nine elements, lines rather than points, where we replace the approximating interpolation with exact affine combinations of lines. The proposed method is validated in a realistic virtual setting. As a collateral contribution, we present a robust algorithm for fitting ruled surfaces of revolution on noisy line measurements.
我们提出了一种新的模型来模拟和校准具有旋转对称性的激光扫描仪,这种对称性存在于激光雷达或具有一个或两个旋转反射镜的旋转激光系统中。我们不是纠结于物理模型的内在参数,而是利用设备的几何性质将其建模为线的特定配置,然后通过线数据驱动的过程进行恢复。与训练通用线模型的通用数据驱动方法相比,我们的代数几何方法只需要少量的测量。我们详细介绍了一种具有两个反射镜的旋转激光扫描仪的情况,我们将其建模为一个由 3×3 线组成的双曲面网格。这提供了一种新的查找表类型,其中包含不超过九个元素的线而不是点,我们用线的精确仿射组合代替了近似插值。该方法在现实的虚拟环境中进行了验证。作为附带的贡献,我们提出了一种用于拟合噪声线测量中旋转直纹面的稳健算法。