Zhang Kong, Pakrashi Vikram, Murphy Jimmy, Hao Guangbo
School of Engineering and Architecture, University College Cork, T12 K8AF Cork, Ireland.
Marine and Renewable Energy Ireland, Environmental Research Institute, University College Cork, P43 C573 Cork, Ireland.
Sensors (Basel). 2024 Jan 30;24(3):911. doi: 10.3390/s24030911.
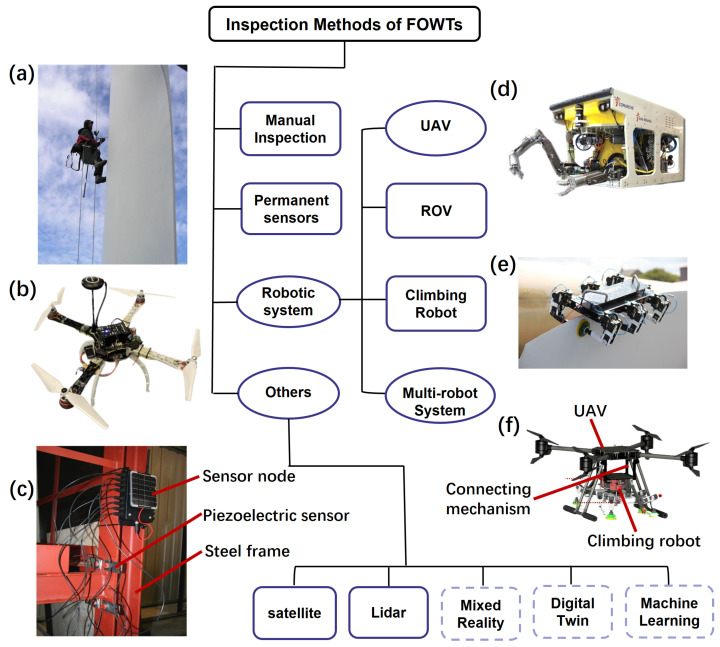
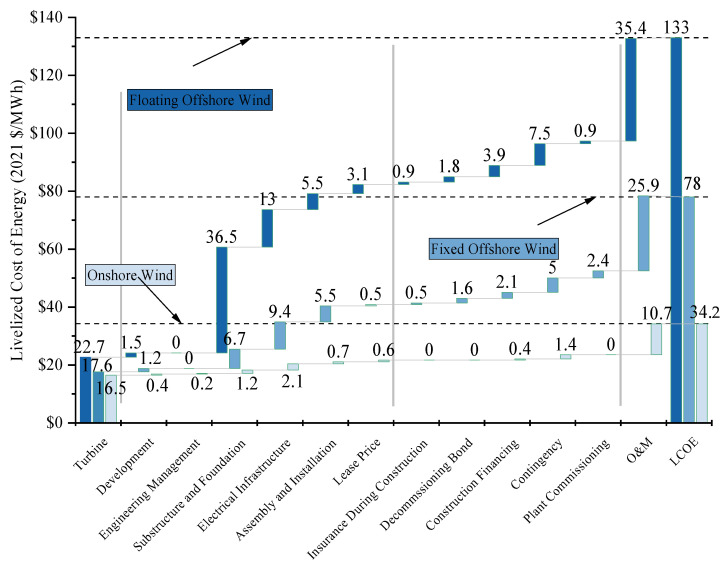
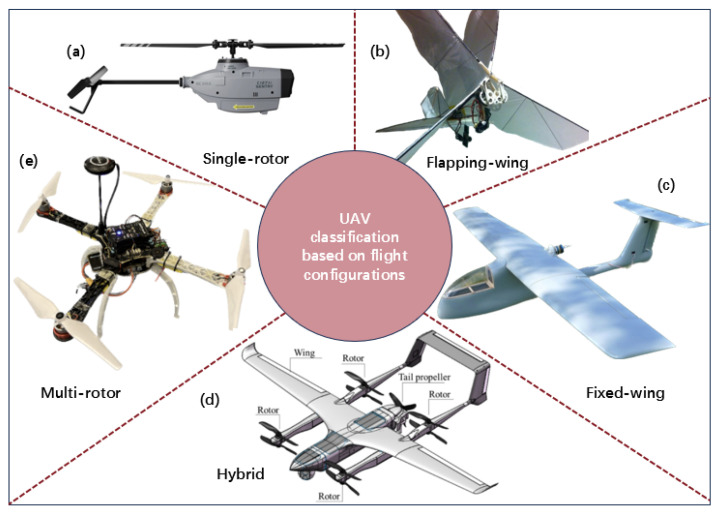
Operations and maintenance (O&M) of floating offshore wind turbines (FOWTs) require regular inspection activities to predict, detect, and troubleshoot faults at high altitudes and in harsh environments such as strong winds, waves, and tides. Their costs typically account for more than 30% of the lifetime cost due to high labor costs and long downtime. Different inspection methods, including manual inspection, permanent sensors, climbing robots, remotely operated vehicles (ROVs), and unmanned aerial vehicles (UAVs), can be employed to fulfill O&M missions. The UAVs, as an enabling technology, can deal with time and space constraints easily and complete tasks in a cost-effective and efficient manner, which have been widely used in different industries in recent years. This study provides valuable insights into the existing applications of UAVs in FOWT inspection, highlighting their potential to reduce the inspection cost and thereby reduce the cost of energy production. The article introduces the rationale for applying UAVs to FOWT inspection and examines the current technical status, research gaps, and future directions in this field by conducting a comprehensive literature review over the past 10 years. This paper will also include a review of UAVs' applications in other infrastructure inspections, such as onshore wind turbines, bridges, power lines, solar power plants, and offshore oil and gas fields, since FOWTs are still in the early stages of development. Finally, the trends of UAV technology and its application in FOWTs inspection are discussed, leading to our future research direction.
浮式海上风力发电机组(FOWT)的运行与维护(O&M)需要定期进行检查活动,以预测、检测和排除高海拔及恶劣环境(如强风、海浪和潮汐)中的故障。由于劳动力成本高和停机时间长,其成本通常占生命周期成本的30%以上。可以采用不同的检查方法,包括人工检查、永久传感器、攀爬机器人、遥控潜水器(ROV)和无人机(UAV)来完成运维任务。无人机作为一种使能技术,能够轻松应对时间和空间限制,并以经济高效的方式完成任务,近年来已在不同行业广泛应用。本研究为无人机在FOWT检查中的现有应用提供了有价值的见解,突出了其降低检查成本从而降低能源生产成本的潜力。本文介绍了将无人机应用于FOWT检查的基本原理,并通过对过去10年的文献进行全面综述,考察了该领域的当前技术现状、研究差距和未来方向。由于FOWT仍处于发展初期,本文还将回顾无人机在其他基础设施检查中的应用,如陆上风力发电机组、桥梁、输电线、太阳能发电厂和海上油气田。最后,讨论了无人机技术及其在FOWT检查中的应用趋势,从而得出我们未来的研究方向。