Guo Taishan, Wang Mingquan, Zhou Shuyu, Song Wenai
School of Instrumentation and Electronic, North University of China, Taiyuan, 030051, China.
Academy for Advanced Interdisciplinary Research, North University of China, Taiyuan, 030051, China.
Sci Rep. 2024 Feb 17;14(1):3979. doi: 10.1038/s41598-024-54761-y.
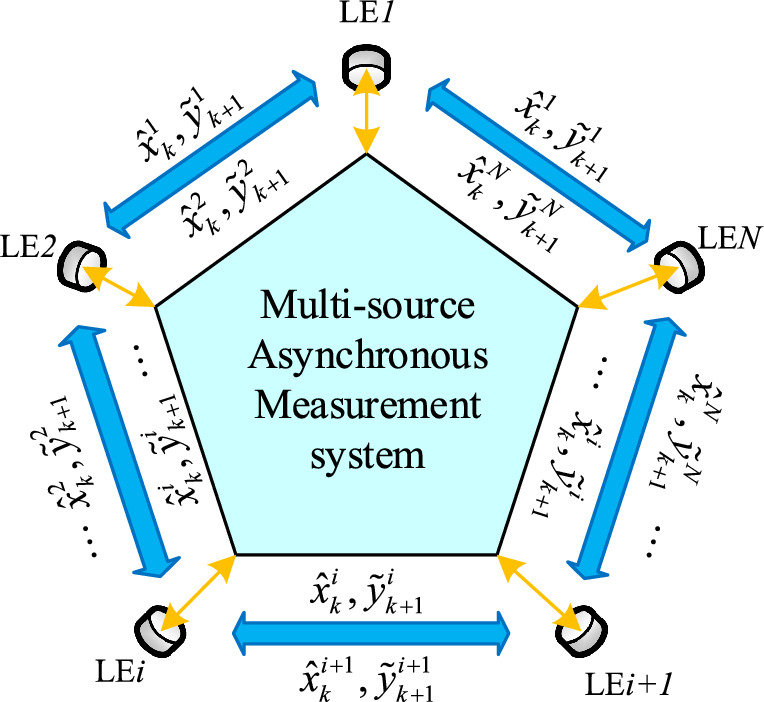
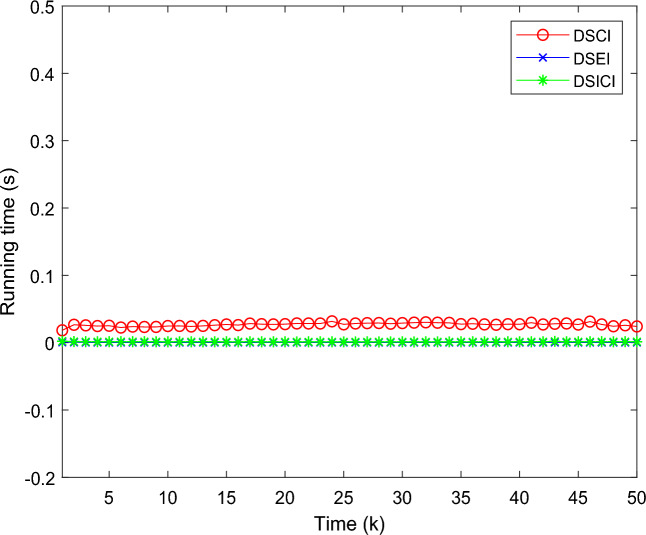
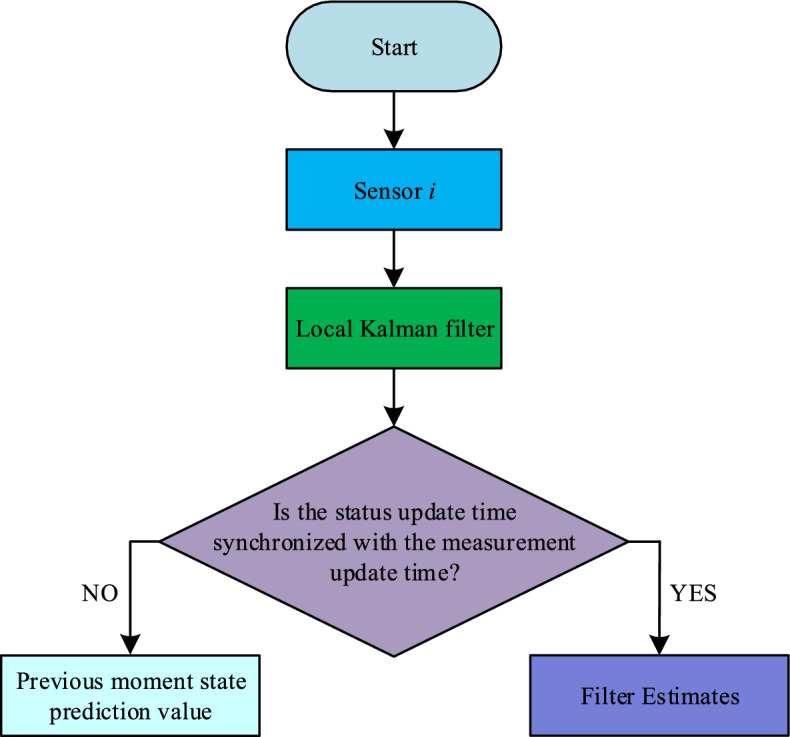
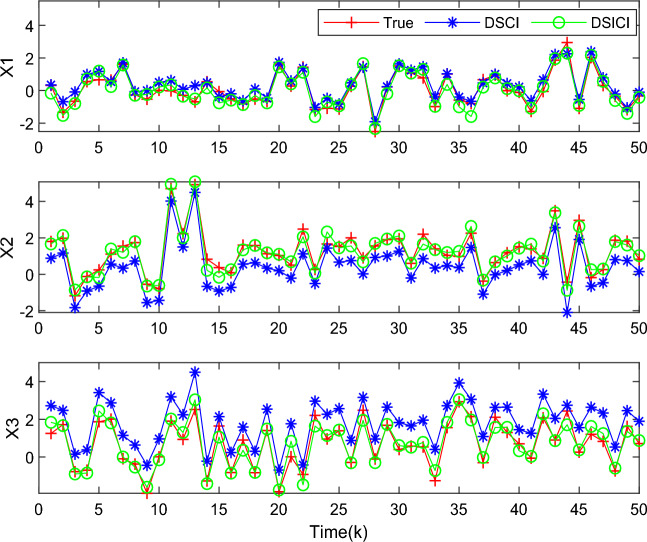
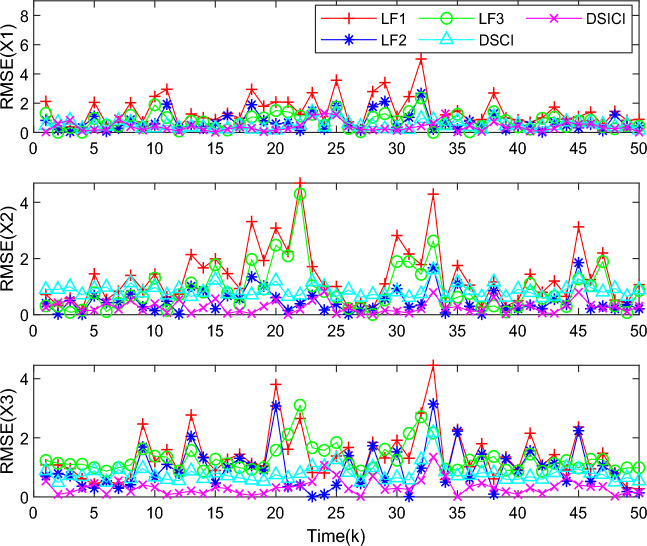
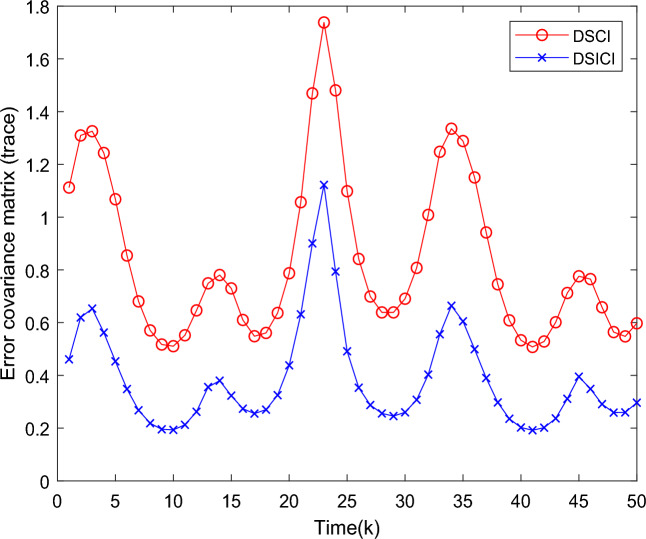
For state estimation of multi-source asynchronous measurement systems with measurement missing phenomena, this paper proposes a distributed sequential inverse covariance intersection (DSICI) fusion algorithm based on conditional Kalman filtering method. It is mainly divided into synchronized state space module, local filtering module and fusion estimation module. The missing measurements occurring in the system are modelled and described by a set of random variables obeying a Bernoulli distribution. The synchronized state space module uses a state iteration method to synchronize the asynchronous measurement system at the moment of measurement update and it ensures the integrity of the measurement information. The local filtering module uses a conditional Kalman filtering algorithm for filter estimation. The reliability of the local filtering results is guaranteed because the local estimator designs a method to interact information with the domain sensors. The fusion estimation module designs a DSICI fusion algorithm with higher accuracy and satisfying consistency, which fuses the filtering results provided by each sensor when the relevant information between multiple sensors is unknown. Simulation examples demonstrate the excellent performance of the proposed algorithm, with a 33% improvement in accuracy over existing algorithms and an iteration time of less than 3 ms.
针对存在测量缺失现象的多源异步测量系统的状态估计问题,本文提出了一种基于条件卡尔曼滤波方法的分布式序贯逆协方差交叉(DSICI)融合算法。该算法主要分为同步状态空间模块、局部滤波模块和融合估计模块。系统中出现的缺失测量值由一组服从伯努利分布的随机变量进行建模和描述。同步状态空间模块在测量更新时刻采用状态迭代方法对异步测量系统进行同步,并确保测量信息的完整性。局部滤波模块采用条件卡尔曼滤波算法进行滤波估计。由于局部估计器设计了一种与域传感器进行信息交互的方法,从而保证了局部滤波结果的可靠性。融合估计模块设计了一种具有更高精度且满足一致性的DSICI融合算法,当多个传感器之间的相关信息未知时,该算法融合每个传感器提供的滤波结果。仿真算例表明了所提算法的优异性能,其精度比现有算法提高了33%,且迭代时间小于3毫秒。