Piana Alberto, Amparore Daniele, Sica Michele, Volpi Gabriele, Checcucci Enrico, Piramide Federico, De Cillis Sabrina, Busacca Giovanni, Scarpelli Gianluca, Sidoti Flavio, Alba Stefano, Piazzolla Pietro, Fiori Cristian, Porpiglia Francesco, Di Dio Michele
Division of Urology, Department of Oncology, School of Medicine, University of Turin, San Luigi Hospital, 10043 Turin, Italy.
Department of Surgery, Candiolo Cancer Institute FPO-IRCCS, 10060 Turin, Italy.
Cancers (Basel). 2024 Mar 4;16(5):1047. doi: 10.3390/cancers16051047.
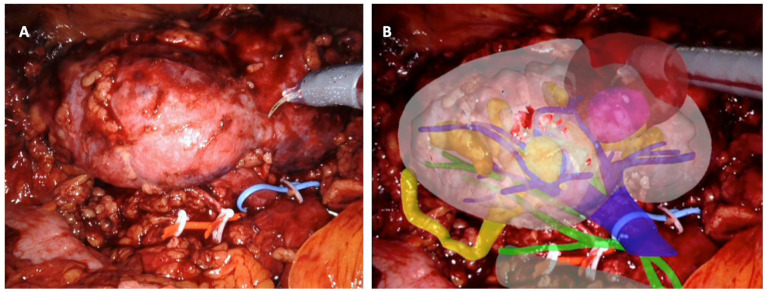
The aim of "Precision Surgery" is to reduce the impact of surgeries on patients' global health. In this context, over the last years, the use of three-dimensional virtual models (3DVMs) of organs has allowed for intraoperative guidance, showing hidden anatomical targets, thus limiting healthy-tissue dissections and subsequent damage during an operation. In order to provide an automatic 3DVM overlapping in the surgical field, we developed and tested a new software, called "ikidney", based on convolutional neural networks (CNNs). From January 2022 to April 2023, patients affected by organ-confined renal masses amenable to RAPN were enrolled. A bioengineer, a software developer, and a surgeon collaborated to create hyper-accurate 3D models for automatic 3D AR-guided RAPN, using CNNs. For each patient, demographic and clinical data were collected. A total of 13 patients were included in the present study. The average anchoring time was 11 (6-13) s. Unintended 3D-model automatic co-registration temporary failures happened in a static setting in one patient, while this happened in one patient in a dynamic setting. There was one failure; in this single case, an ultrasound drop-in probe was used to detect the neoplasm, and the surgery was performed under ultrasound guidance instead of AR guidance. No major intraoperative nor postoperative complications (i.e., Clavien Dindo > 2) were recorded. The employment of AI has unveiled several new scenarios in clinical practice, thanks to its ability to perform specific tasks autonomously. We employed CNNs for an automatic 3DVM overlapping during RAPN, thus improving the accuracy of the superimposition process.
“精准手术”的目的是减少手术对患者整体健康的影响。在这种背景下,在过去几年中,器官三维虚拟模型(3DVM)的使用实现了术中引导,显示出隐藏的解剖靶点,从而在手术过程中限制了健康组织的解剖及后续损伤。为了在手术视野中实现自动3DVM重叠,我们基于卷积神经网络(CNN)开发并测试了一款名为“ikidney”的新软件。从2022年1月至2023年4月,纳入了适合接受机器人辅助经皮肾镜手术(RAPN)治疗的局限性肾肿物患者。一名生物工程师、一名软件开发人员和一名外科医生合作,使用CNN创建了用于自动3D增强现实(AR)引导下RAPN的超精确3D模型。收集了每位患者的人口统计学和临床数据。本研究共纳入13例患者。平均锚定时间为11(6 - 13)秒。在静态环境中有1例患者发生了意外的3D模型自动配准临时失败,在动态环境中也有1例患者出现这种情况。出现了1次失败;在这一单独病例中,使用了超声插入式探头来检测肿瘤,并在超声引导而非AR引导下进行了手术。未记录到严重的术中及术后并发症(即Clavien Dindo分级>2级)。由于人工智能能够自主执行特定任务,其应用在临床实践中展现出了几种新的场景。我们在RAPN过程中使用CNN进行自动3DVM重叠,从而提高了叠加过程的准确性。