Gao Ying Jie, Yan Shu Jia, Tong Mei Song, Chen Jun You, Chen Qiang
School of Electronic and Electrical Engineering, Shanghai University of Engineering Science, Shanghai, 201620, China.
Department of Electronic Science and Technology, Tongji University, Shanghai, 201804, China.
Sci Rep. 2024 Sep 17;14(1):21661. doi: 10.1038/s41598-024-72574-x.
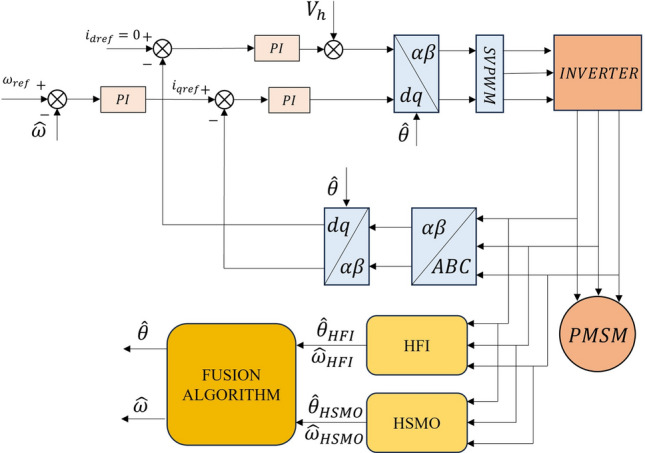
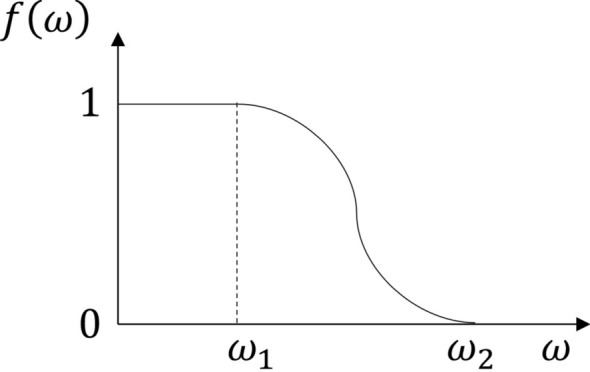
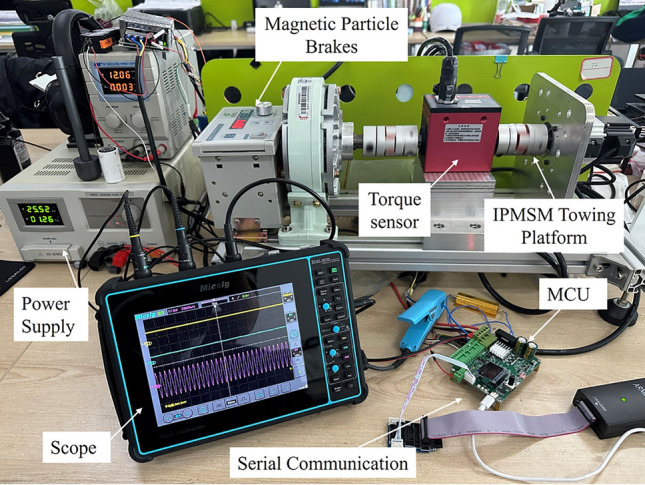
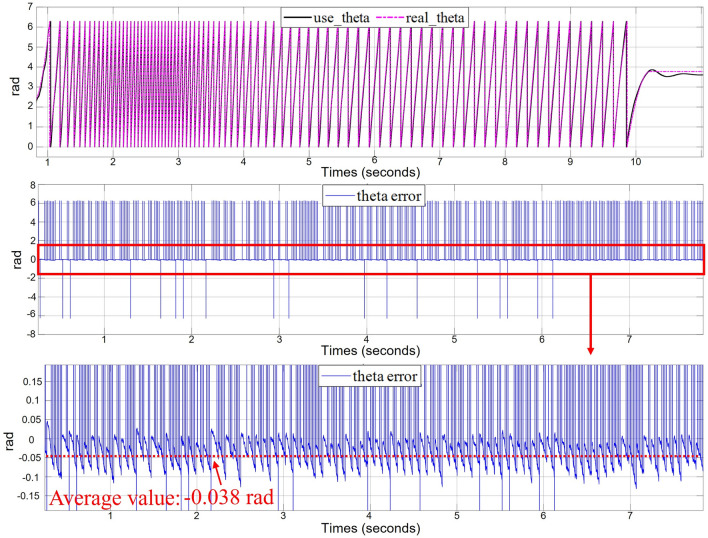
Aiming at the problem that an Interior Permanent Magnet Synchronous Motor (IPMSM) cannot be smoothly started in zero-low speed range and smoothly transitioned to medium-high speed range by a single observer. This paper proposes a full-speed range control algorithm based on the fusion of pulsating high-frequency injection and back electromotive force (EMF) position error information. In the low-speed range or at start-up, a square-wave high-frequency signal is injected, and the obtained high-frequency current signal is processed to obtain the rotor position error information. The phase shift due to the introduction of a filter is reduced, which improves the control bandwidth and reduces the noise. To ensure smooth switching of the observer, the observer uses a dual second-order generalized integrator module to output the angular frequency in the low-speed range. A higher-order sliding mode observer based on an inverse EMF model obtains rotor position error information at high speeds. During switching, the rotor position information is processed by a fusion strategy, and the obtained hybrid information is fed into the system to improve the stability of the motor operation. A 0.2 kW IPMSM position sensorless vector control system verifies the algorithm's accuracy.
针对内置式永磁同步电机(IPMSM)无法通过单一观测器在零低速范围内顺利启动并平稳过渡到中高速范围的问题,本文提出了一种基于脉动高频注入和反电动势(EMF)位置误差信息融合的全速度范围控制算法。在低速范围或启动时,注入方波高频信号,并对获得的高频电流信号进行处理以获得转子位置误差信息。减少了因引入滤波器而导致的相位偏移,提高了控制带宽并降低了噪声。为确保观测器的平滑切换,观测器在低速范围内使用双二阶广义积分器模块输出角频率。基于反电动势模型的高阶滑模观测器在高速时获得转子位置误差信息。在切换过程中,通过融合策略处理转子位置信息,并将获得的混合信息馈入系统以提高电机运行的稳定性。一个0.2kW的IPMSM无位置传感器矢量控制系统验证了该算法的准确性。