Tao Fazhan, Ding Zhaowei, Fu Zhigao, Li Mengyang, Ji Baofeng
School of Information Engineering, Henan University of Science and Technology, Luoyang, 471000, China.
Longmen Laboratory, Luoyang, 471000, China.
Sci Rep. 2024 Oct 21;14(1):24698. doi: 10.1038/s41598-024-76299-9.
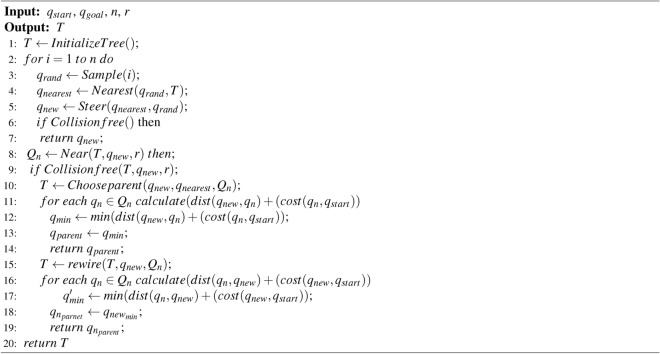
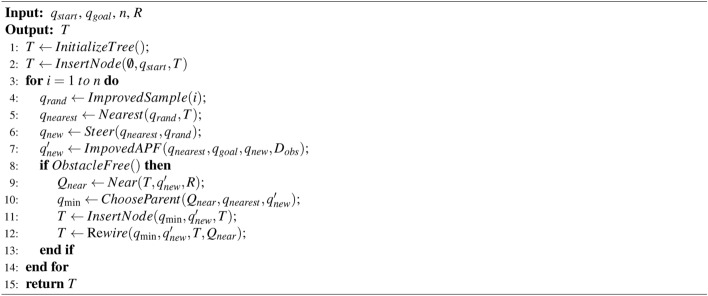
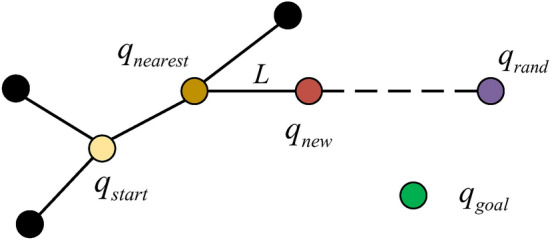
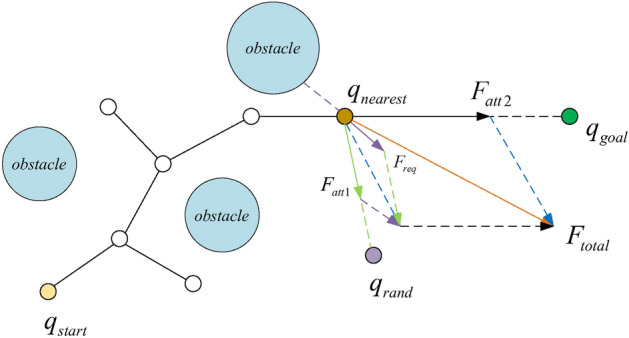
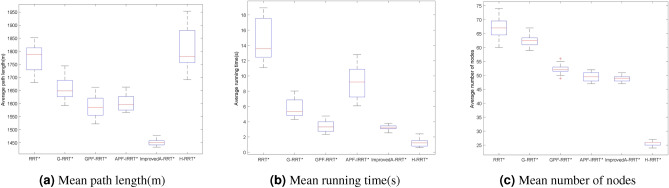
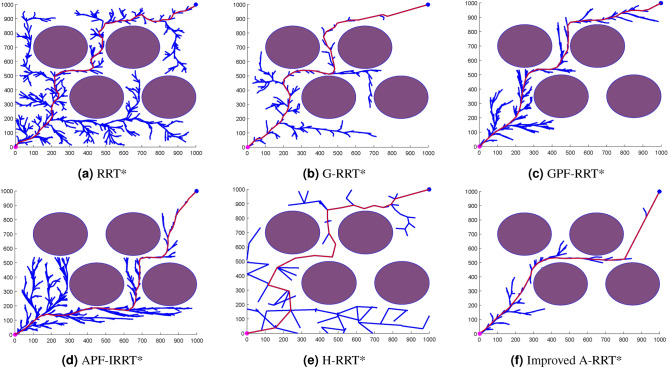
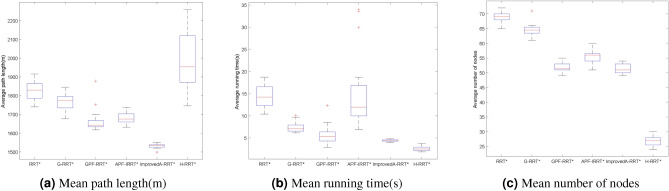
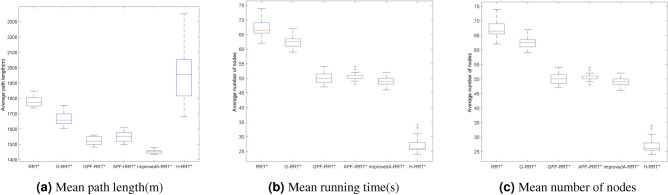
With the rapid development of autonomous driving technology, path planning has gained significant attention as it holds great potential for improving safety. The Rapidly-exploring Random Tree star(RRT*) algorithm has attracted much attention because of its good adaptability and expansibility. However, how solving problems in the RRT* algorithm such as slow convergence time, significant search range randomness, and unpredictability is a challenge. Therefore, an RRT* enhancement algorithm combining variable probability goal-bias strategy and artificial potential field(APF) method(Improved A-RRT*) is proposed in this paper. Firstly, the variable probability goal-bias strategy is introduced in the sampling process to make random tree expand towards the target direction and improve the directional searchability of the random tree. Secondly, the potential field function in APF is improved to prevent falling into local optimum problems during path generation. Thirdly, improved APF is combined with RRT*, the target generates a gravitational field on random tree, and the obstacle generates a repulsive force on it, leading random tree to grow toward the target region. Finally, the proposed algorithm is compared with RRT* algorithm and its derivative algorithm. The experimental results demonstrate that the proposed algorithm has obvious optimizations in convergence speed and path quality.
随着自动驾驶技术的快速发展,路径规划因其在提高安全性方面具有巨大潜力而备受关注。快速扩展随机树星型(RRT*)算法因其良好的适应性和扩展性而备受瞩目。然而,如何解决RRT算法中收敛时间长、搜索范围随机性大以及不可预测性等问题是一项挑战。因此,本文提出了一种结合可变概率目标偏向策略和人工势场(APF)方法的RRT增强算法(改进的A-RRT*)。首先,在采样过程中引入可变概率目标偏向策略,使随机树朝着目标方向扩展,提高随机树的定向搜索能力。其次,对APF中的势场函数进行改进,以防止在路径生成过程中陷入局部最优问题。第三,将改进的APF与RRT相结合,目标在随机树上产生引力场,障碍物在随机树上产生排斥力,引导随机树向目标区域生长。最后,将所提算法与RRT算法及其衍生算法进行比较。实验结果表明,所提算法在收敛速度和路径质量方面有明显优化。