Liu Xionghua, Huang Kai-Lun, Liang Chang-Duo, Xu Jing-Zhe, Chen Qian, Ge Ming-Feng
School of Computer Science and Automation, Wuhan Technology and Business University, Wuhan, 430065, China.
School of Artificial Intelligence and Automation, Huazhong University of Science and Technology, Wuhan, 430074, China.
Sci Rep. 2024 Oct 26;14(1):25460. doi: 10.1038/s41598-024-75618-4.
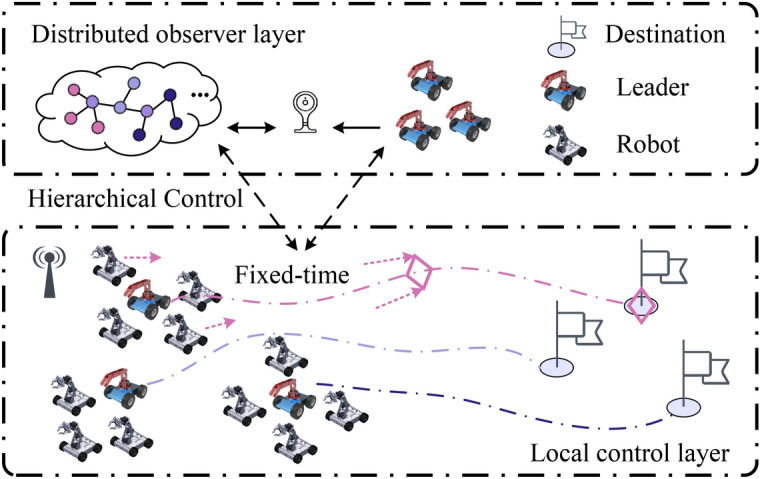
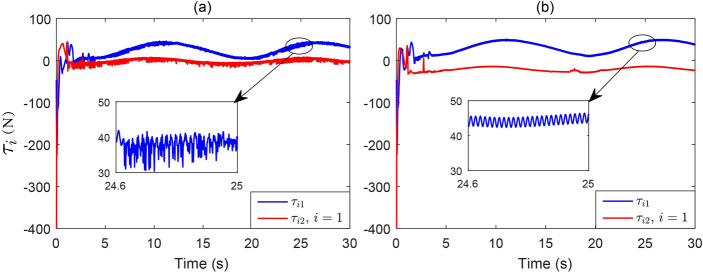
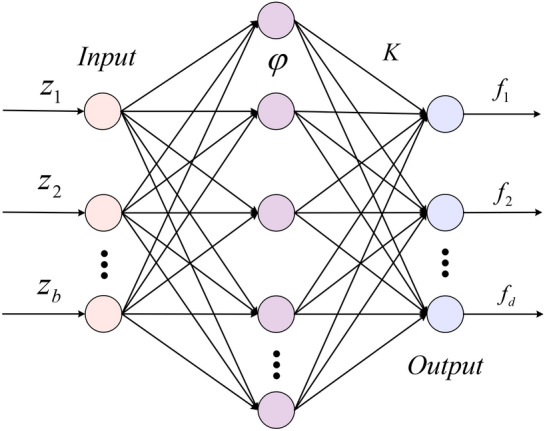
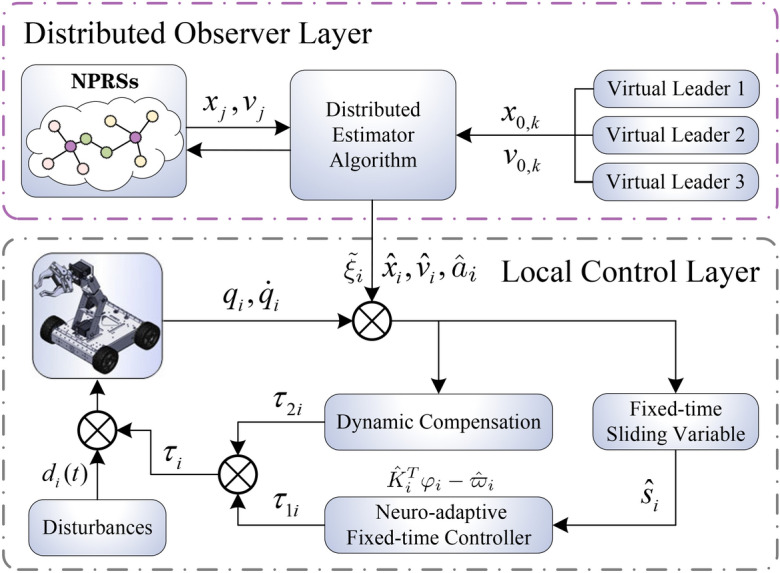
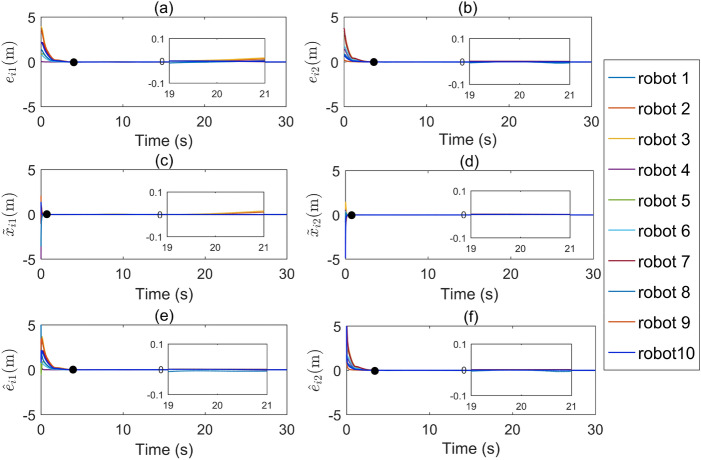
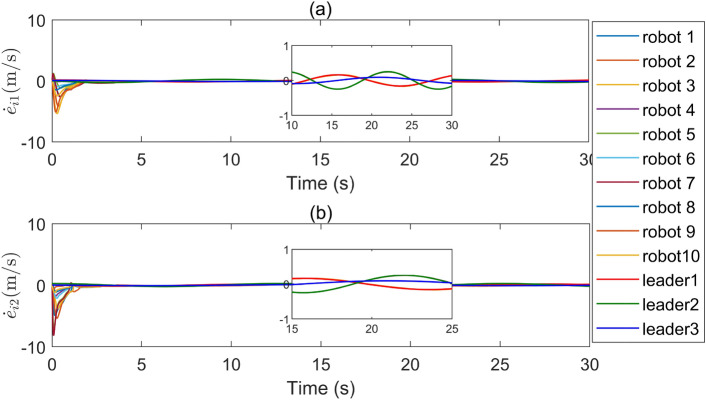
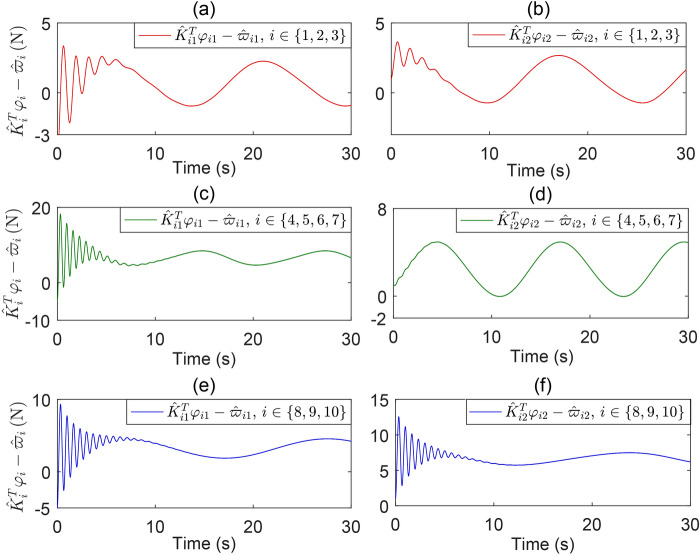
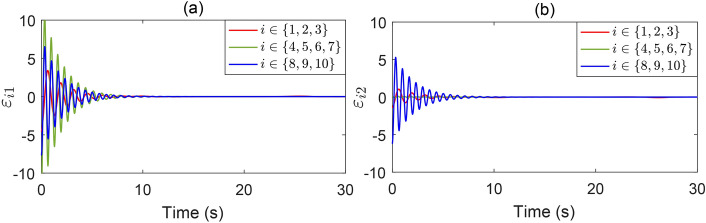
This paper investigates the fixed-time cluster formation tracking (CFT) problem for networked perturbed robotic systems (NPRSs) under directed graph information interaction, considering parametric uncertainties, external perturbations, and actuator input deadzone. To address this complex problem, a novel hierarchical fixed-time neural adaptive control algorithm is proposed based on a hierarchical fixed-time framework and a neural adaptive control strategy. The objective of this study is to achieve accurate CFT of NPRSs within a fixed time. Specifically, we design a distributed observer algorithm to estimate the states of the virtual leader within a fixed time accurately. By using these observers, a neural adaptive fixed-time controller is developed in the local control layer to ensure rapid and reliable system performance. Through the use of the Lyapunov argument, we derive sufficient conditions on the control parameters to guarantee the fixed-time stability of NPRSs. The theoretical results are eventually validated through numerical simulations, demonstrating the effectiveness and robustness of the proposed approach.
本文研究了在有向图信息交互下,考虑参数不确定性、外部扰动和执行器输入死区的网络化受扰机器人系统(NPRSs)的固定时间集群形成跟踪(CFT)问题。为解决这一复杂问题,基于分层固定时间框架和神经自适应控制策略,提出了一种新颖的分层固定时间神经自适应控制算法。本研究的目的是在固定时间内实现NPRSs的精确CFT。具体而言,我们设计了一种分布式观测器算法,以在固定时间内准确估计虚拟领导者的状态。通过使用这些观测器,在局部控制层中开发了一种神经自适应固定时间控制器,以确保系统性能快速且可靠。通过使用李雅普诺夫论证,我们推导了控制参数的充分条件,以保证NPRSs的固定时间稳定性。最终通过数值模拟验证了理论结果,证明了所提方法的有效性和鲁棒性。