Sha Haojie, Gao Qingrui, Zeng Hao, Li Kai, Li Wang, Zhang Xuande, Wang Xiaohui
College of Applied Technology, Qingdao University, Qingdao, 266100, China.
Institute of Software Chinese Academy of Sciences, Beijing, 100000, China.
Sci Rep. 2024 Nov 18;14(1):28420. doi: 10.1038/s41598-024-77097-z.
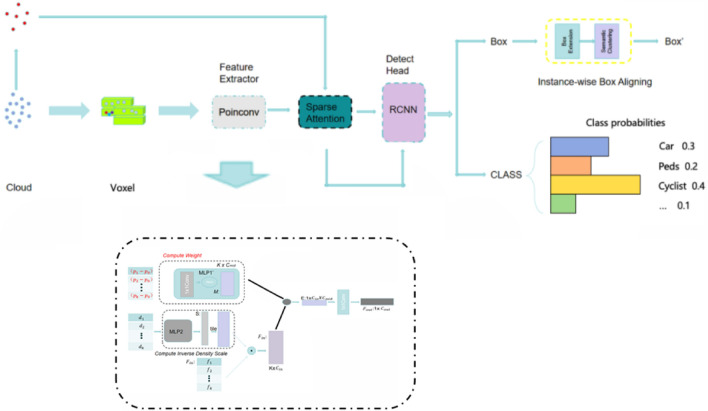
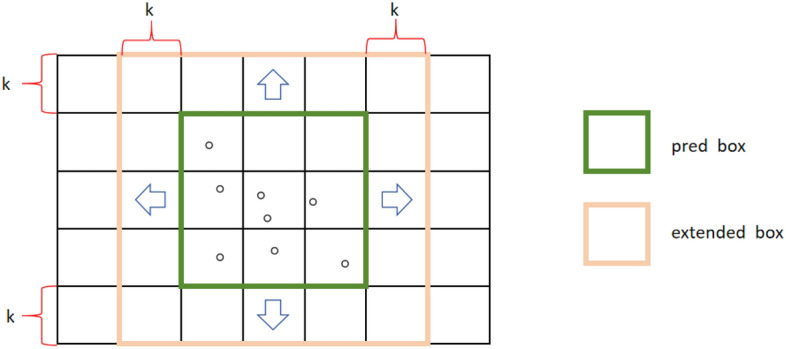
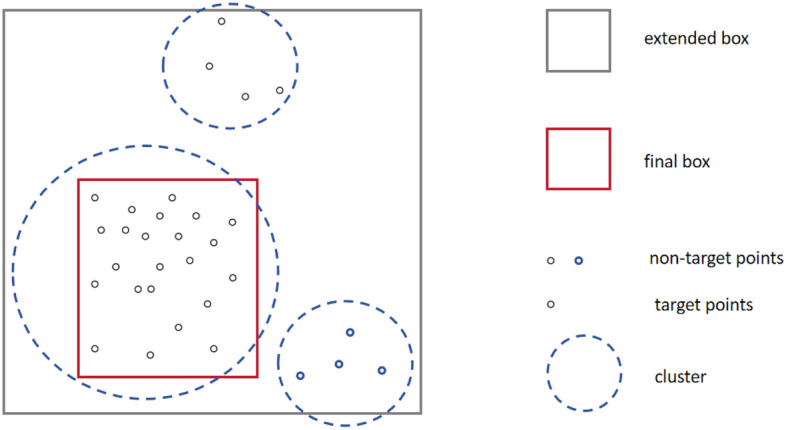
Object detection in point clouds is essential for various applications, including autonomous navigation, household robots, and augmented/virtual reality. However, during voxelization and Bird's Eye View transformation, local point cloud data often remains sparse due to non-target areas and noise points, posing a significant challenge for feature extraction. In this paper, we propose a novel mechanism named Keypoint Guided Sparse Attention (KGSA) to enhance the semantic information of point clouds by calculating Euclidean distances between selected keypoints and others. Additionally, we introduce Instance-wise Box Aligning, a method for expanding predicted boxes and clustering the points within them to achieve precise alignment between predicted bounding boxes and ground-truth targets. Experimental results demonstrate the superiority of our proposed SPBA-Net in 3D object detection on point clouds compared to other state-of-the-art methods.The datasets used and/or analysed during the current study available from the corresponding author on reasonable request.
点云中的目标检测对于各种应用至关重要,包括自主导航、家用机器人以及增强/虚拟现实。然而,在体素化和鸟瞰图转换过程中,由于非目标区域和噪声点,局部点云数据往往仍然稀疏,这给特征提取带来了重大挑战。在本文中,我们提出了一种名为关键点引导稀疏注意力(KGSA)的新颖机制,通过计算选定关键点与其他点之间的欧几里得距离来增强点云的语义信息。此外,我们引入了实例级框对齐,这是一种扩展预测框并对其中的点进行聚类的方法,以实现预测边界框与地面真值目标之间的精确对齐。实验结果表明,与其他现有先进方法相比,我们提出的SPBA-Net在点云的3D目标检测中具有优越性。本研究中使用和/或分析的数据集可根据合理要求从相应作者处获得。