Friedl Werner
Institute of Robotics and Mechatronics, German Aerospace Center (DLR), Wessling, Germany.
Front Robot AI. 2024 Nov 7;11:1351932. doi: 10.3389/frobt.2024.1351932. eCollection 2024.
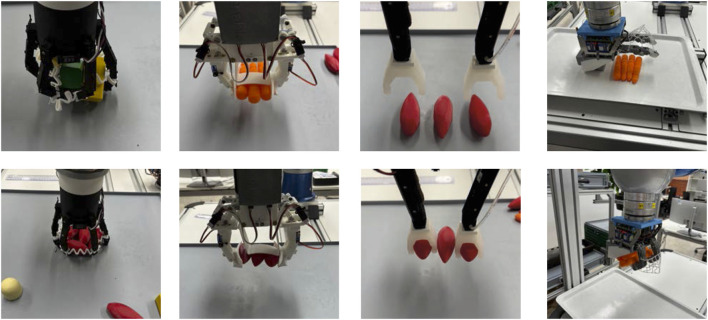
For certain tasks in logistics, especially bin picking and packing, humans resort to a strategy of grasping multiple objects simultaneously, thus reducing picking and transport time. In contrast, robotic systems mainly grasp only one object per picking action, which leads to inefficiencies that could be solved with a smarter gripping hardware and strategies. Development of new manipulators, robotic hands, hybrid or specialized grippers, can already consider such challenges for multi-object grasping in the design stages. This paper introduces different hardware solutions and tests possible grasp strategies for the simultaneous grasping of multiple objects (SGMO). The four hardware solutions presented here are: an under-actuated Constriction Gripper, Linear Scoop Gripper suitable for deform-able object grasping, Hybrid Compliant Gripper equipped with mini vacuum gripper on each fingertip, and a Two-finger Palm Hand with fingers optimized by simulation in pybullet for maximum in-hand manipulation workspace. Most of these hardware solutions are based on the DLR CLASH end-effector and have variable stiffness actuation, high impact robustness, small contact forces, and low-cost design. For the comparison of the capability to simultaneously grasp multiple objects and the capability to grasp a single delicate object in a cluttered environment, the manipulators are tested with four different objects in an extra designed benchmark. The results serve as guideline for future commercial applications of these strategies.
在物流的某些任务中,尤其是料箱拣选和包装,人类会采用同时抓取多个物体的策略,从而减少拣选和运输时间。相比之下,机器人系统每次抓取动作主要只抓取一个物体,这导致了效率低下,而通过更智能的抓取硬件和策略可以解决这些问题。新型操纵器、机器人手、混合或专用夹具的开发,在设计阶段就已经可以考虑多物体抓取的此类挑战。本文介绍了不同的硬件解决方案,并测试了同时抓取多个物体(SGMO)的可能抓取策略。这里介绍的四种硬件解决方案是:欠驱动收缩夹具、适用于抓取可变形物体的线性铲形夹具、每个指尖都配备微型真空夹具的混合柔顺夹具,以及通过在PyBullet中进行模拟优化手指以实现最大手中操作工作空间的双指掌形手。这些硬件解决方案大多基于德国航空航天中心(DLR)的CLASH末端执行器,具有可变刚度驱动、高抗冲击性、小接触力和低成本设计。为了比较在杂乱环境中同时抓取多个物体的能力和抓取单个易碎物体的能力,在一个专门设计的基准测试中用四种不同的物体对操纵器进行了测试。这些结果为这些策略未来的商业应用提供了指导。