Qing Haitao, Guo Jiacheng, Zhu Yuanhang, Chi Yinding, Hong Yaoye, Quinn Daniel, Dong Haibo, Yin Jie
Department of Mechanical and Aerospace Engineering, North Carolina State University, Raleigh, NC 27695, USA.
Department of Mechanical and Aerospace Engineering, University of Virginia, Charlottesville, VA 22903, USA.
Sci Adv. 2024 Dec 6;10(49):eadq4222. doi: 10.1126/sciadv.adq4222. Epub 2024 Dec 4.
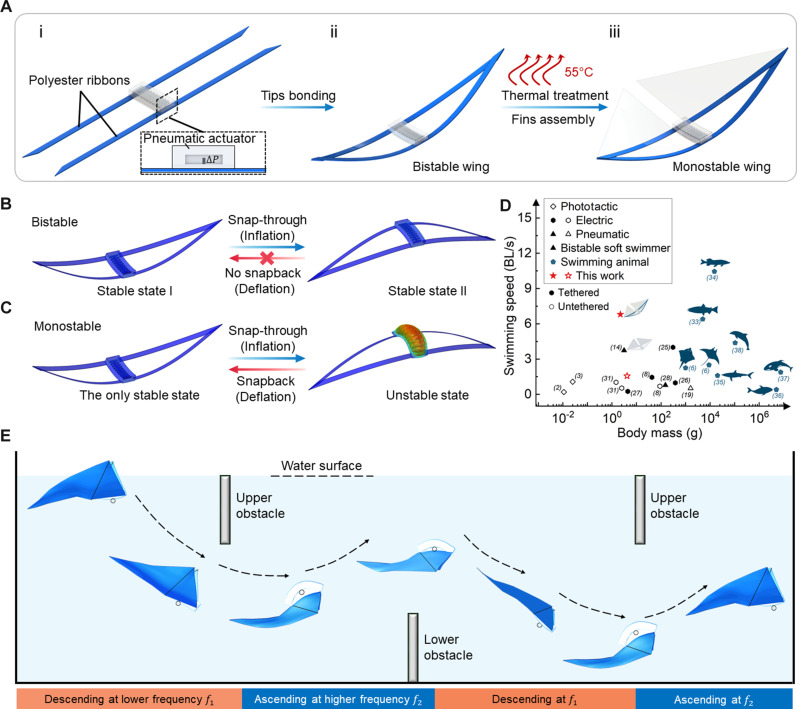
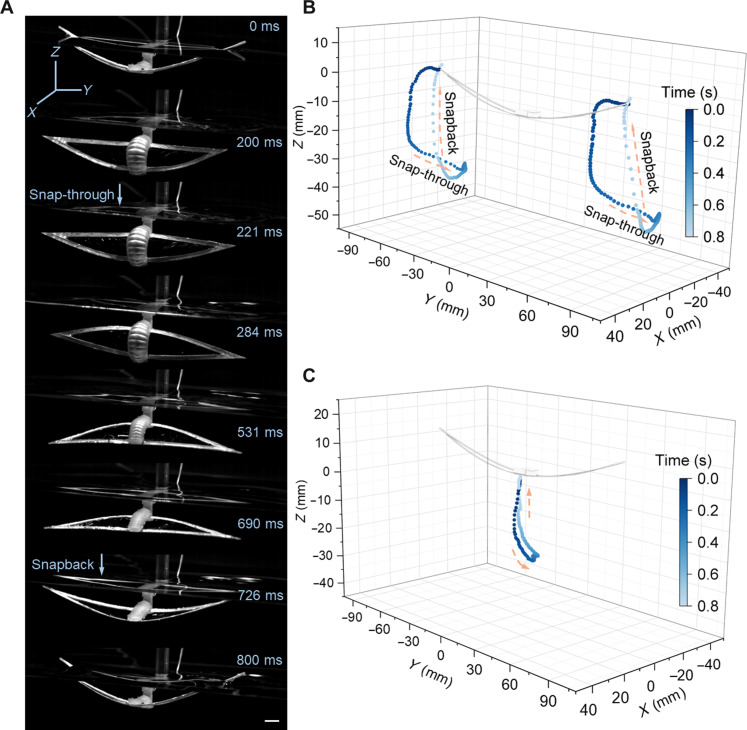
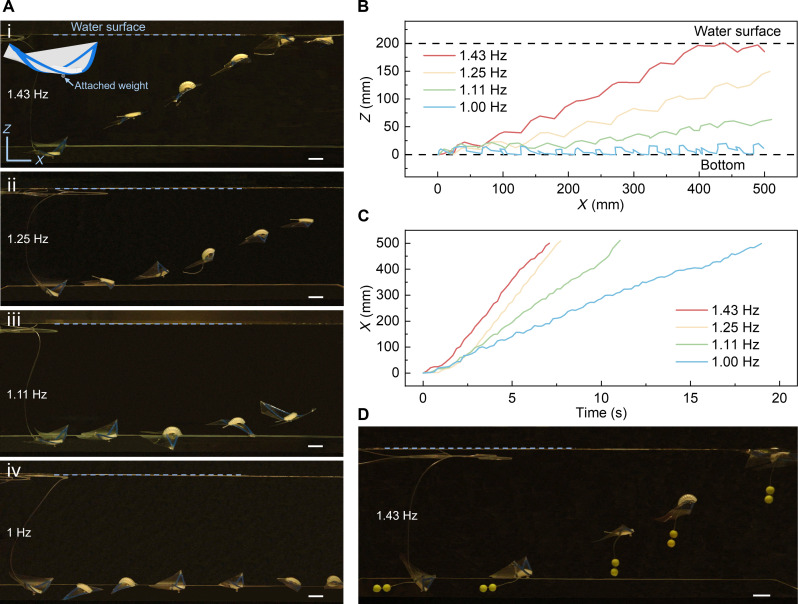
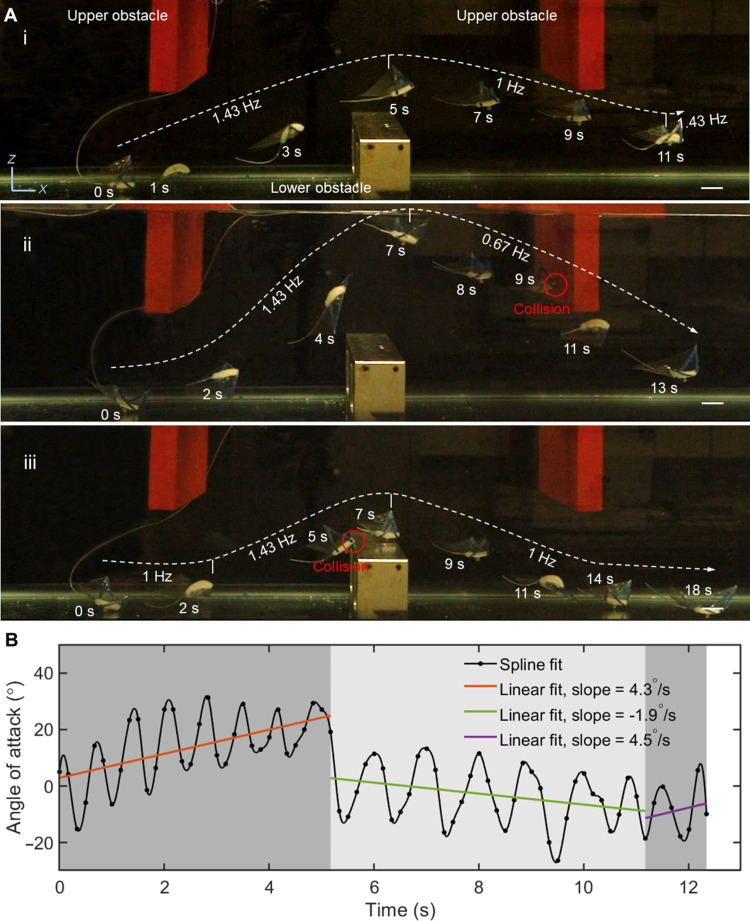
Manta rays use wing-like pectoral fins for intriguing oscillatory swimming. It provides rich inspiration for designing potentially fast, efficient, and maneuverable soft swimming robots, which, however, have yet to be realized. It remains a grand challenge to combine fast speed, high efficiency, and high maneuverability in a single soft swimmer while using simple actuation and control. Here, we report leveraging spontaneous snapping stroke in the monostable flapping wing of a manta-like soft swimmer to address the challenge. The monostable wing is pneumatically actuated to instantaneously snap through to stroke down, and upon deflation, it will spontaneously stroke up by snapping back to its initial state, driven by elastic restoring force, without consuming additional energy. This largely simplifies designs, actuation, and control for achieving a record-high speed of 6.8 body length per second, high energy efficiency, and high maneuverability and collision resilience in navigating through underwater unstructured environments with obstacles by simply tuning single-input actuation frequencies.
蝠鲼利用类似翅膀的胸鳍进行有趣的摆动式游泳。这为设计潜在的快速、高效且灵活的软质游泳机器人提供了丰富的灵感,然而,此类机器人尚未实现。在单个软质游泳器中结合快速、高效和高机动性,同时使用简单的驱动和控制,仍然是一个巨大的挑战。在此,我们报告利用一种类似蝠鲼的软质游泳器的单稳态扑翼中的自发快速拍打冲程来应对这一挑战。单稳态翅膀通过气动驱动瞬间快速向下拍打,放气时,在弹性恢复力的驱动下,它会自发地快速向上拍打回到初始状态,而无需消耗额外能量。这在很大程度上简化了设计、驱动和控制,通过简单调整单输入驱动频率,在穿越有障碍物的水下非结构化环境时实现了创纪录的每秒6.8个身体长度的高速、高能量效率以及高机动性和碰撞恢复能力。