de Roode Lotte M, de Boer Lisanne L, Sterenborg Henricus J C M, Ruers Theo J M
Image-Guided Surgery, Department of Surgery, the Netherlands Cancer Institute-Antoni van Leeuwenhoek, Plesmanlaan 121, Postbus 90203, 1066 CX Amsterdam, The Netherlands.
Department of Nanobiophysics, Faculty of Science and Technology, University of Twente, Drienerlolaan 5, 7522 NB Enschede, The Netherlands.
Biomed Opt Express. 2024 Nov 11;15(12):6756-6767. doi: 10.1364/BOE.534558. eCollection 2024 Dec 1.
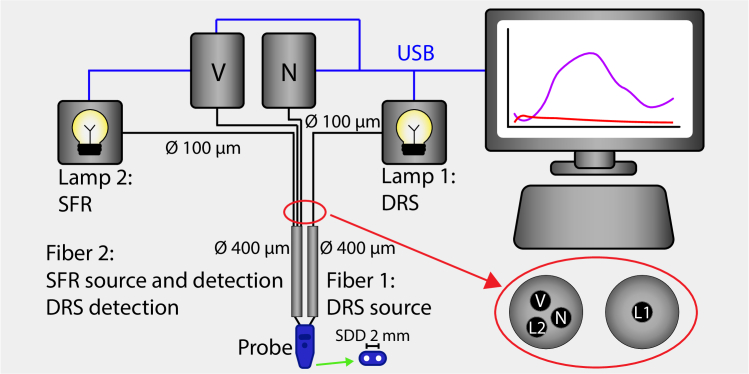
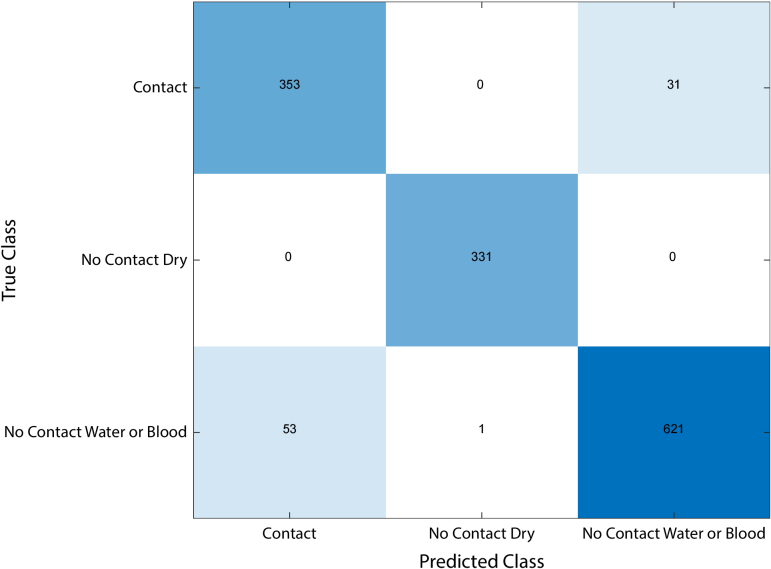
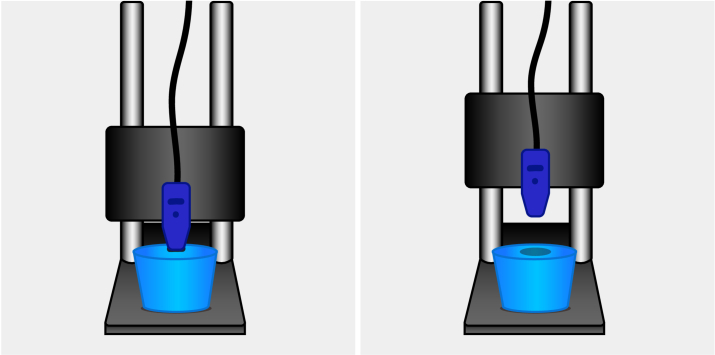
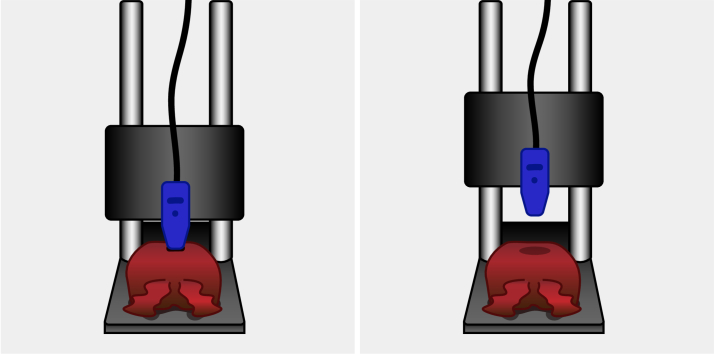
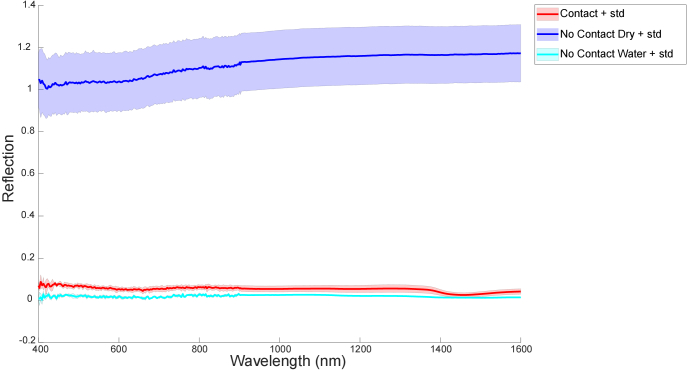
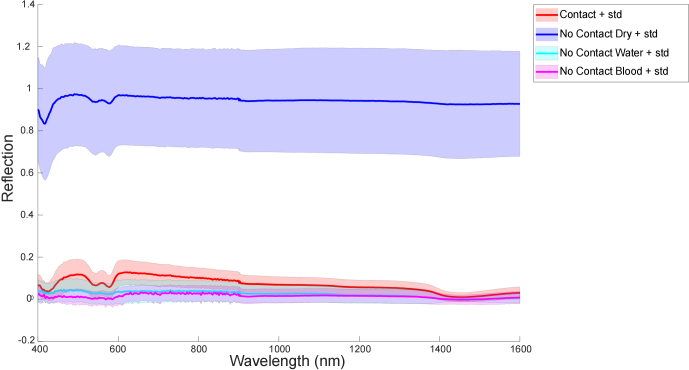
The introduction of robotic surgery has improved minimally invasive surgery, and now robotic surgery is used in several areas of surgical oncology. Several optical techniques can be used to discriminate cancer from healthy tissue based on their optical properties. These technologies can also be employed with a small fiber-optic probe during minimally invasive surgery; however, for acquiring reliable measurements, some optical techniques require the fiber-optic probe to be in direct contact with the tissue. The lack of tactile feedback in robotic surgery makes assessing tissue-probe contact suitable for optical contact measurements challenging for the surgeon. In this study, we investigated the use of single fiber reflectance (SFR) to determine tissue-probe contact adequately. A machine learning-based algorithm was developed to classify if direct tissue-probe contact was present during the measurement in an ex-vivo tissue setup. Using this classification algorithm, an average accuracy of 93.9% was achieved for assessing probe-tissue contact, suggesting that this technique can be utilized to assess tissue-probe contact in an in vivo clinical setting.
机器人手术的引入改善了微创手术,如今机器人手术已应用于外科肿瘤学的多个领域。基于健康组织和癌症组织的光学特性,可采用多种光学技术来区分二者。这些技术也可在微创手术期间与小型光纤探头配合使用;然而,为了获得可靠的测量结果,一些光学技术要求光纤探头与组织直接接触。机器人手术中缺乏触觉反馈,这使得评估适合光学接触测量的组织 - 探头接触情况对外科医生而言具有挑战性。在本研究中,我们研究了使用单纤维反射率(SFR)来充分确定组织 - 探头接触情况。我们开发了一种基于机器学习的算法,用于在离体组织设置中测量期间对是否存在直接的组织 - 探头接触进行分类。使用这种分类算法,评估探头与组织接触的平均准确率达到了93.9%,这表明该技术可用于在体内临床环境中评估组织 - 探头接触情况。