Gong Junghwan, Kim Hyunbin, Lee Seunghwan
School of Electronic Engineering, Kumoh National Institute of Technology, Gumi 39177, Republic of Korea.
Sensors (Basel). 2024 Nov 23;24(23):7482. doi: 10.3390/s24237482.
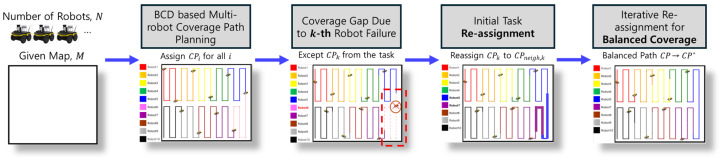
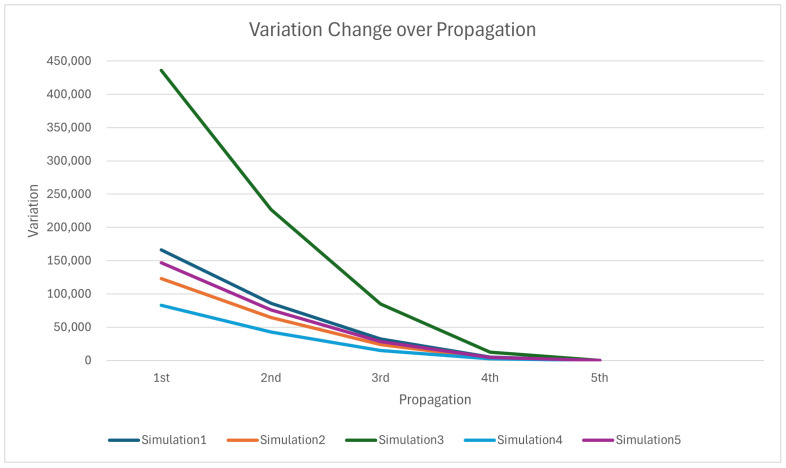
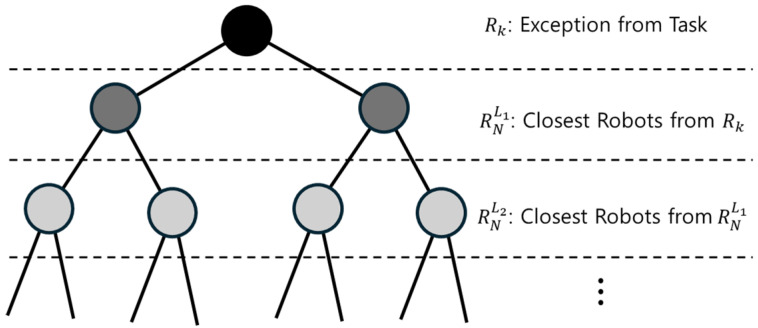
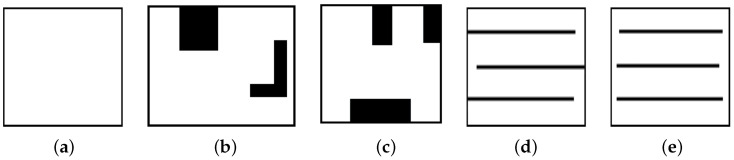
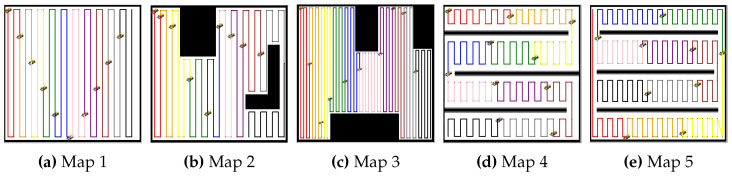
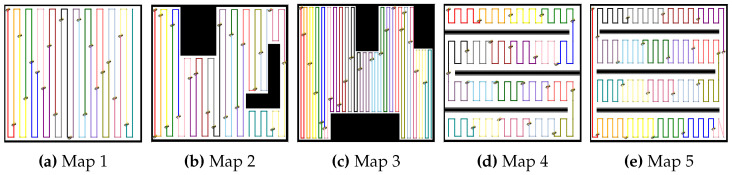
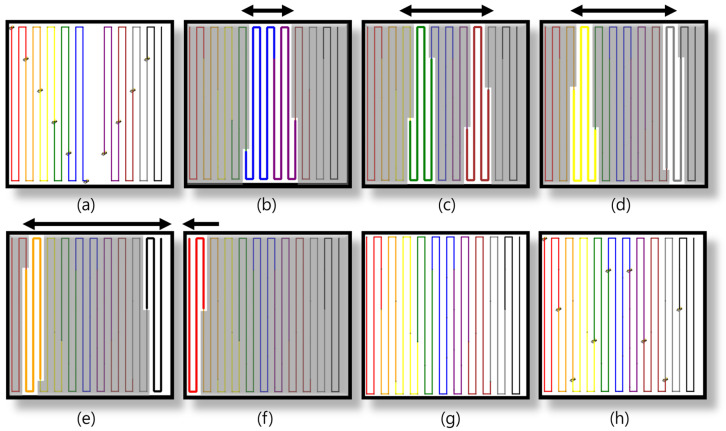
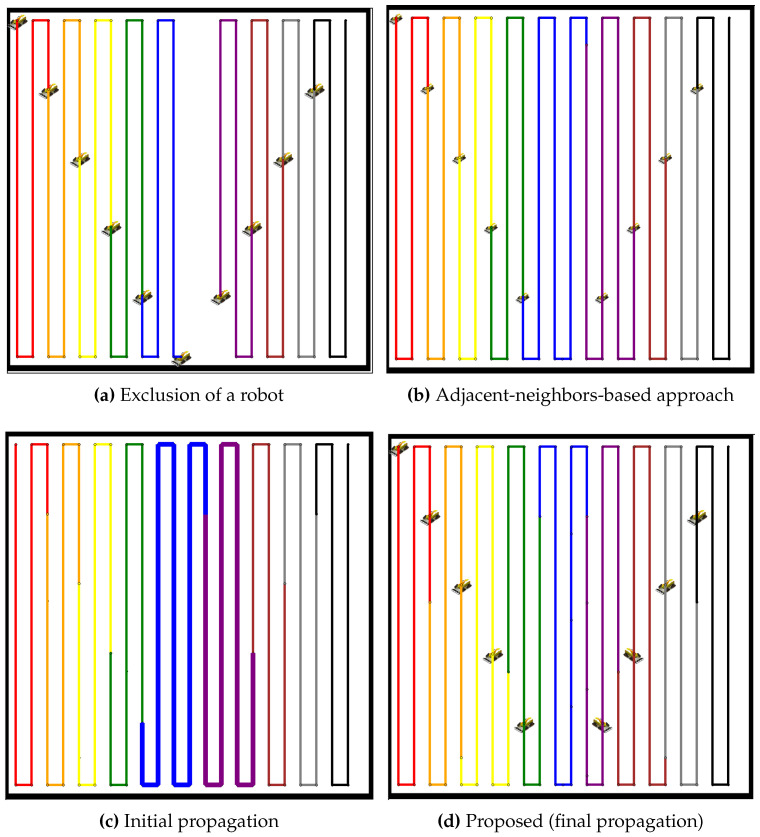
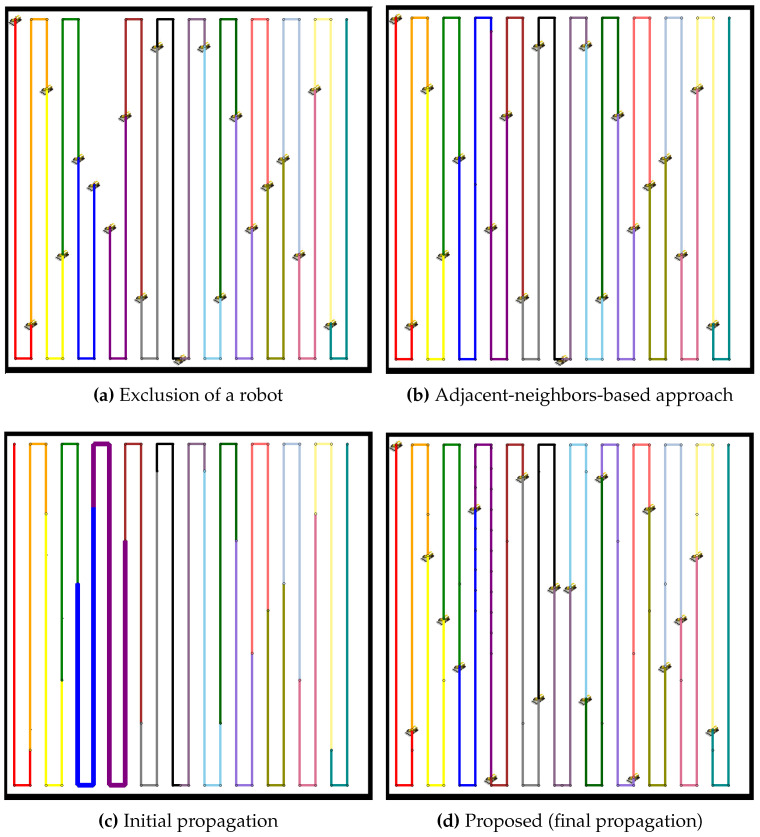
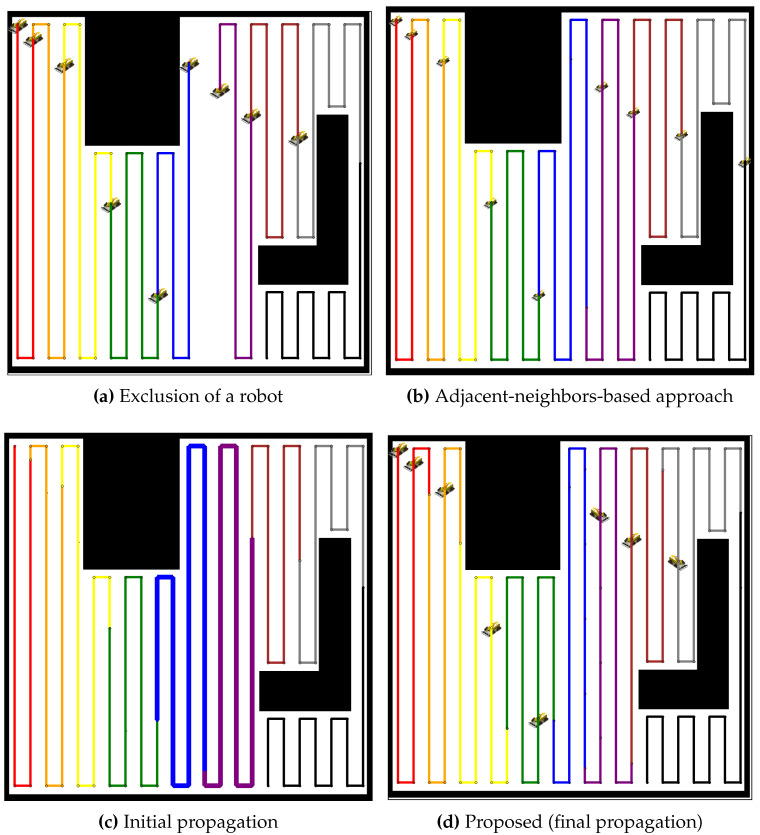
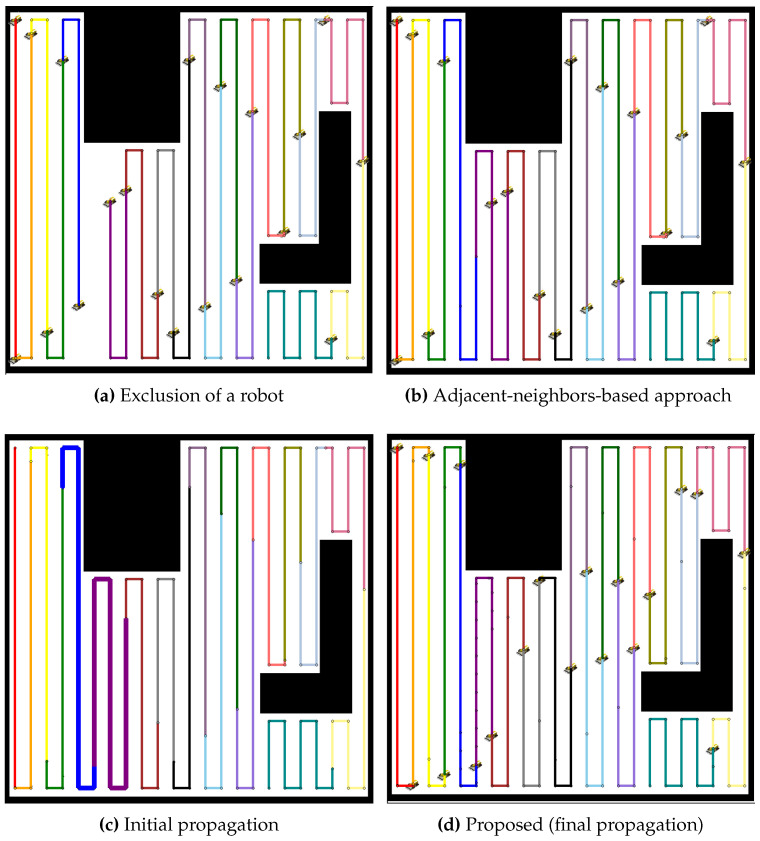
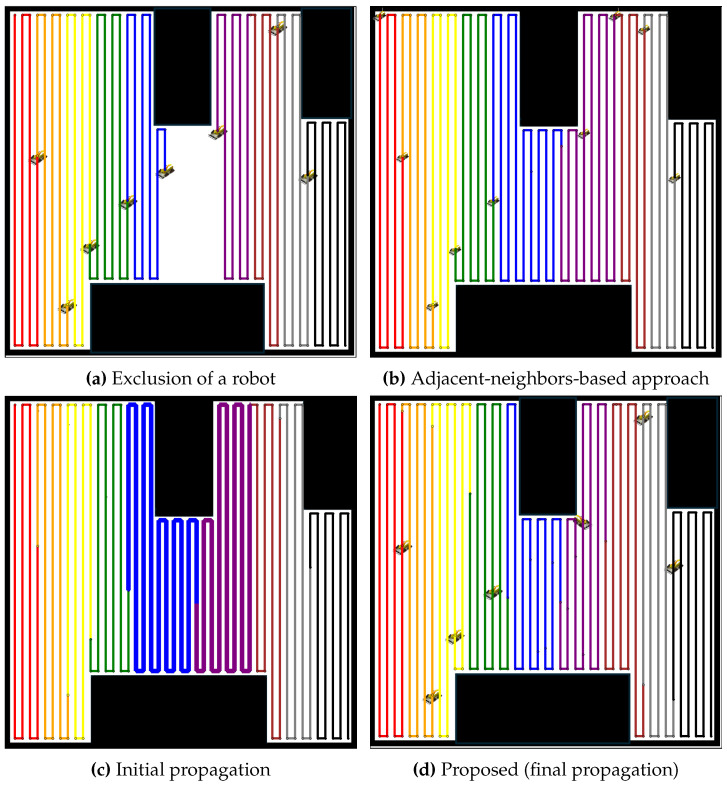
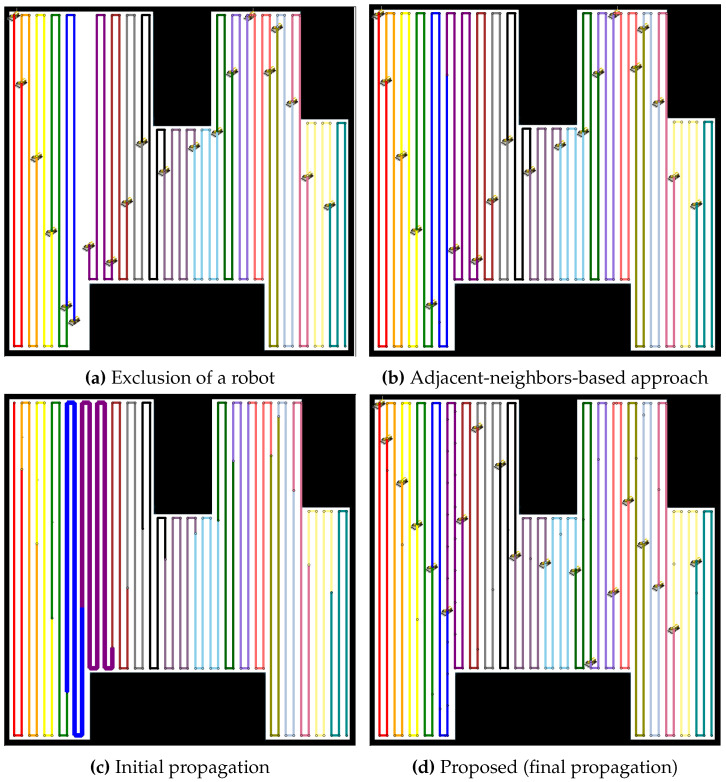
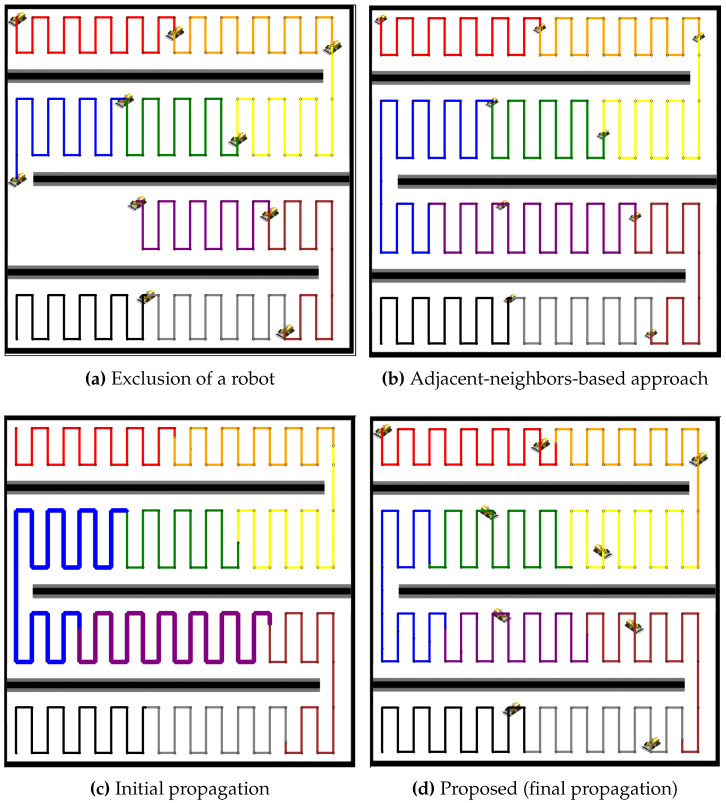
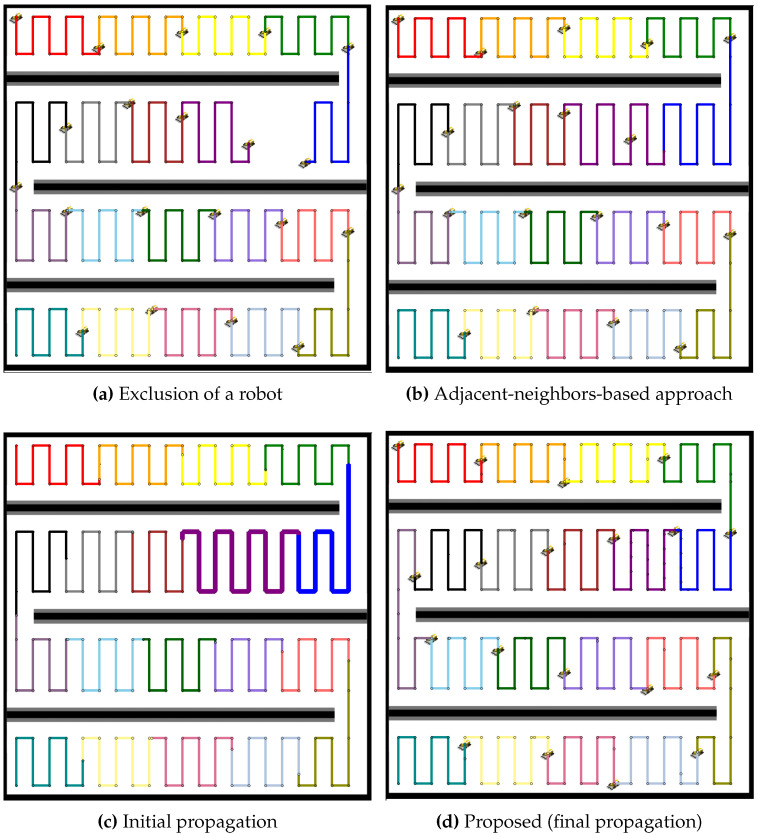
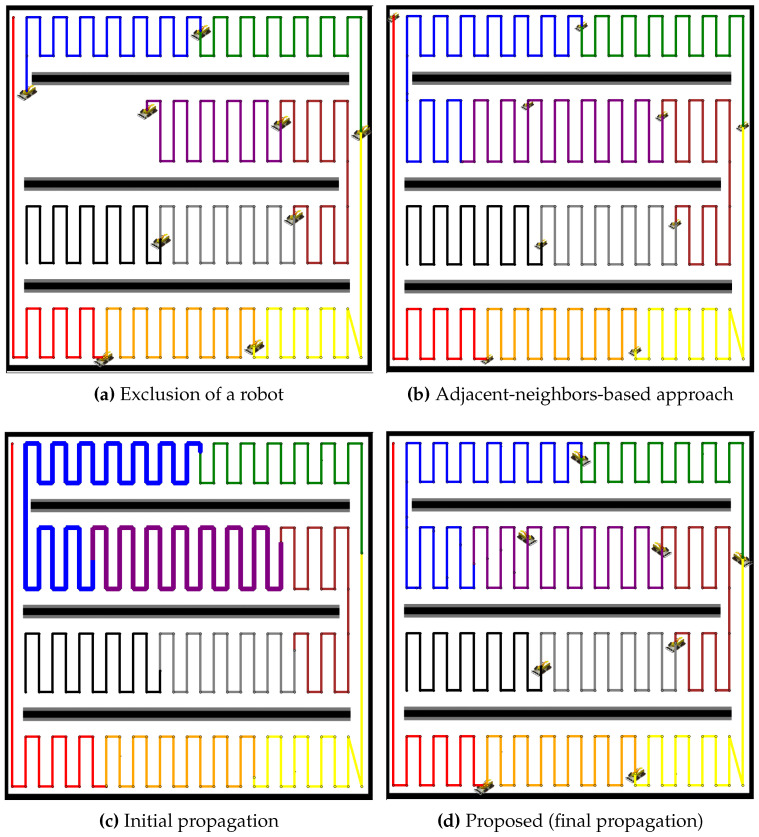
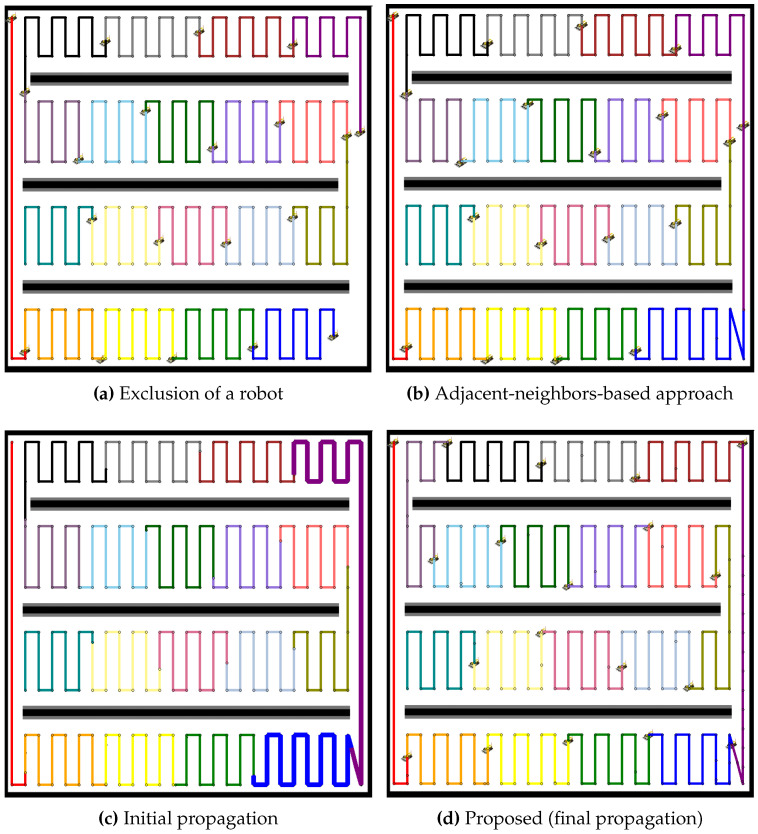
This study introduces a resilient and adaptive multi-robot coverage path planning approach based on the Boustrophedon Cell Decomposition algorithm, designed to dynamically redistribute coverage tasks in the event of robot failures. The proposed method ensures minimal disruption and maintains a balanced workload across operational robots through a propagation-based redistribution strategy. By iteratively reallocating the failed robot's coverage path to neighboring robots, the method prevents any single robot from becoming overburdened, ensuring efficient task distribution and continuous environmental monitoring. Simulations conducted in five distinct environments, ranging from simple open areas to complex, obstacle-rich terrains, demonstrate the method's robustness and adaptability. A key strength of the proposed approach is its fast and efficient task reallocation process, achieved with minimal propagation cycles, making it suitable for real-time applications even in complex scenarios. The approach reduces task variance and maintains balanced coverage throughout the mission.
本研究介绍了一种基于双向行扫描单元分解算法的弹性自适应多机器人覆盖路径规划方法,该方法旨在当机器人出现故障时动态重新分配覆盖任务。所提出的方法通过基于传播的重新分配策略,确保干扰最小化,并在运行的机器人之间保持平衡的工作量。通过将故障机器人的覆盖路径迭代地重新分配给相邻机器人,该方法可防止任何单个机器人负担过重,确保高效的任务分配和持续的环境监测。在从简单开放区域到复杂、障碍物众多的地形等五种不同环境中进行的模拟,证明了该方法的鲁棒性和适应性。所提出方法的一个关键优势在于其快速高效的任务重新分配过程,该过程通过最少的传播周期实现,使其即使在复杂场景下也适用于实时应用。该方法减少了任务差异,并在整个任务过程中保持平衡的覆盖范围。