Zhao Yan, Wang Zhongxun, Li Hui, Wang Chang, Zhang Jianhua, Zhu Jingyuan, Liu Xuan
School of Mechanical Engineering, University of Science and Technology Beijing, Beijing 100083, China.
School of Mechanical Engineering, Hebei University of Technology, Tianjin 300401, China.
Sensors (Basel). 2024 Dec 23;24(24):8215. doi: 10.3390/s24248215.
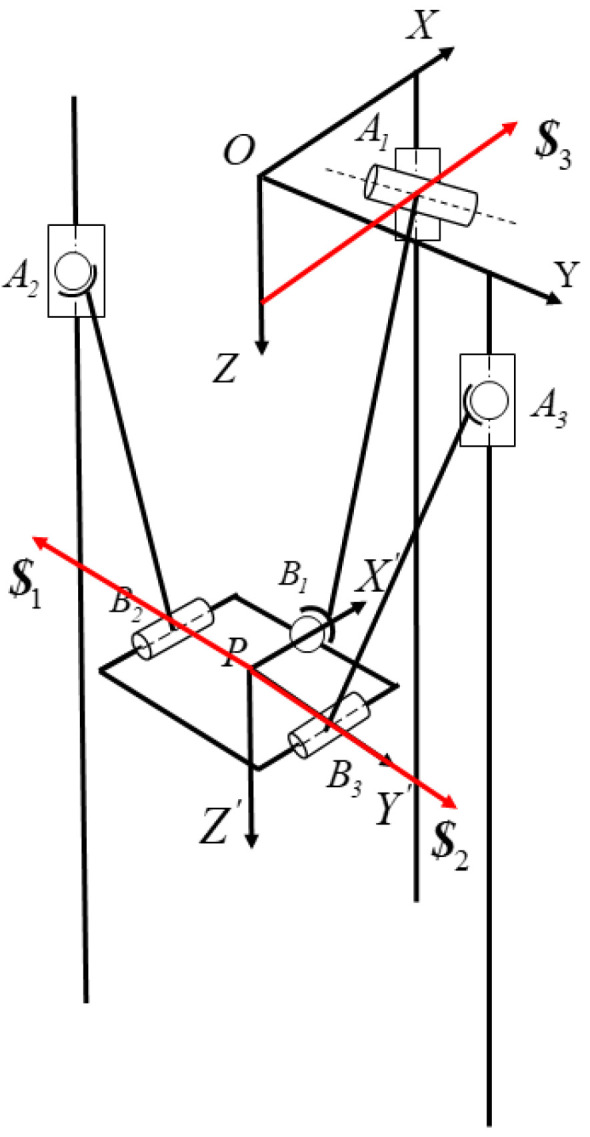
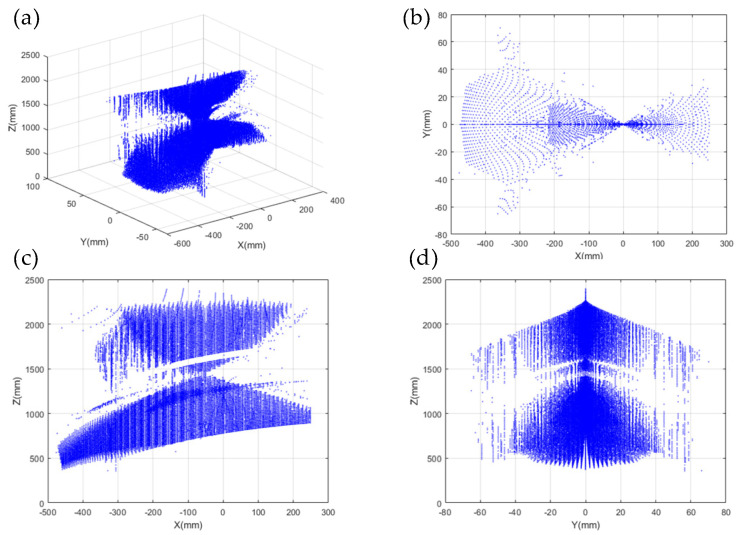
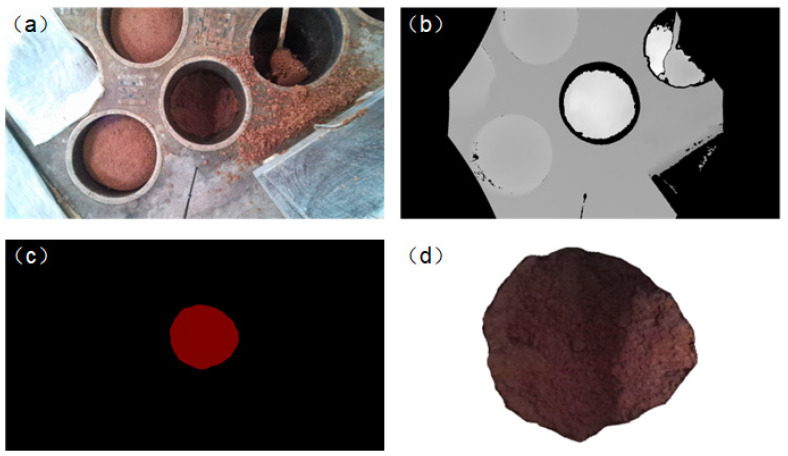
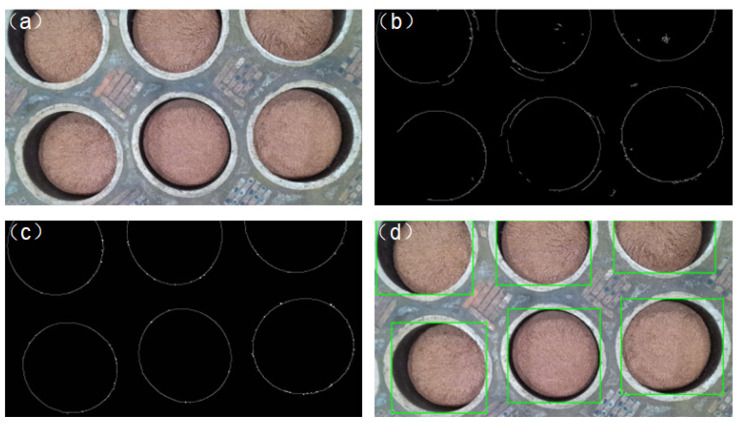
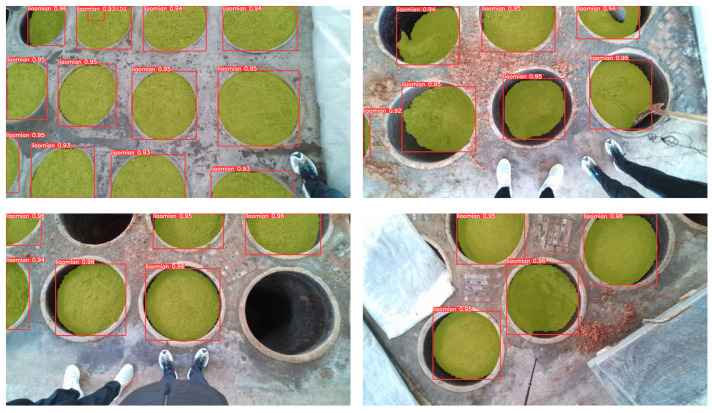
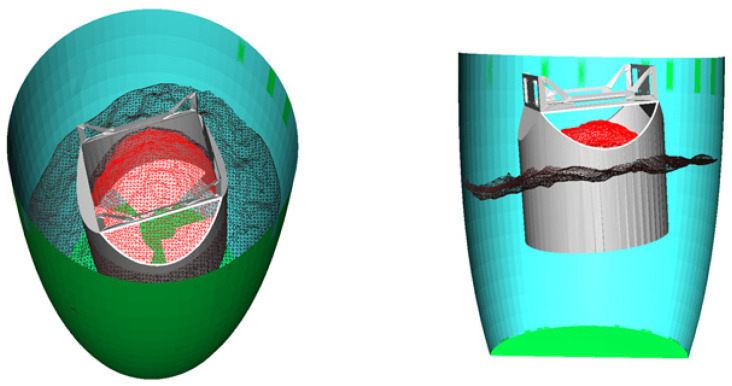
Addressing the issue of excessive manual intervention in discharging fermented grains from underground tanks in traditional brewing technology, this paper proposes an intelligent grains-out strategy based on a multi-degree-of-freedom hybrid robot. The robot's structure and control system are introduced, along with analyses of kinematics solutions for its parallel components and end-effector speeds. According to its structural characteristics and working conditions, a visual-perception-based motion control method of discharging fermented grains is determined. The enhanced perception of underground tanks' positions is achieved through improved Canny edge detection algorithms, and a YOLO-v7 neural network is employed to train an image segmentation model for fermented grains' surface, integrating depth information to synthesize point clouds. We then carry out the downsampling and three-dimensional reconstruction of these point clouds, then match the underground tank model with the fermented grain surface model to replicate the tank's interior space. Finally, a digging motion control method is proposed and experimentally validated for feasibility and operational efficiency.
针对传统酿造工艺中地下酒窖出糟时人工干预过多的问题,本文提出了一种基于多自由度混合机器人的智能出糟策略。介绍了该机器人的结构和控制系统,并分析了其并联部件的运动学求解和末端执行器速度。根据其结构特点和工作条件,确定了一种基于视觉感知的出糟运动控制方法。通过改进的Canny边缘检测算法增强了对地下酒窖位置的感知,并采用YOLO-v7神经网络训练酒糟表面的图像分割模型,融合深度信息合成点云。然后对这些点云进行下采样和三维重建,将地下酒窖模型与酒糟表面模型进行匹配以重现酒窖内部空间。最后,提出了一种挖掘运动控制方法,并通过实验验证了其可行性和运行效率。