Cao Miaolong, Mao Huawei, Tang Xiaohui, Sun Yuzhou, Chen Tiandong
School of Mechanical and Energy Engineering, Zhejiang University of Science and Technology, Hangzhou, 310023, China.
Zhejiang Ansheng Science & Technology Stock Co.,Ltd, Yongkang, 321314, China.
Sci Rep. 2025 Jan 22;15(1):2836. doi: 10.1038/s41598-025-87113-5.
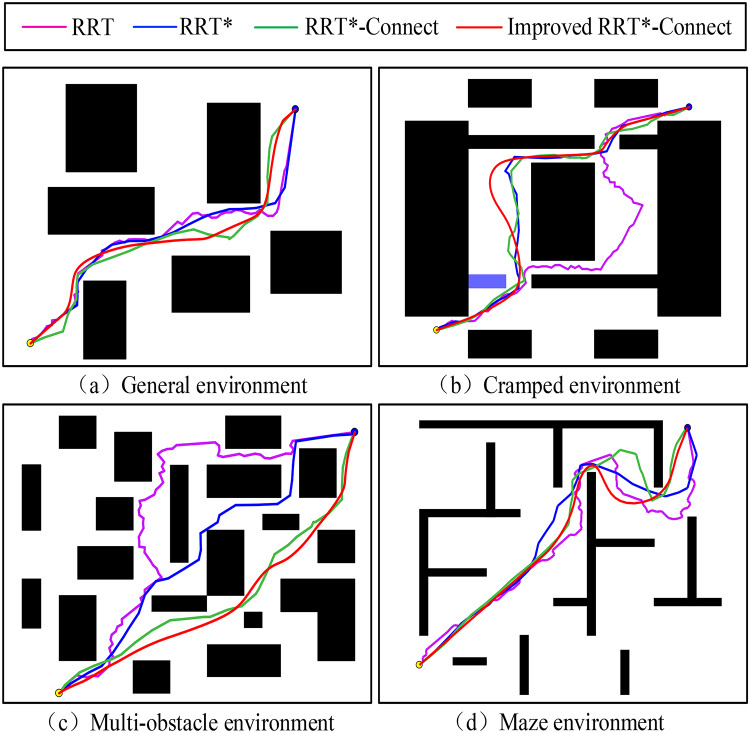
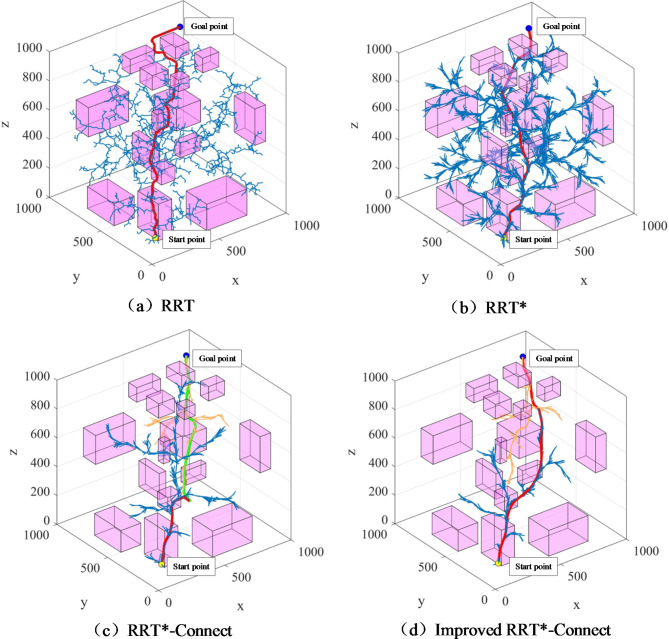
To address the limitations of the original algorithm, several optimization techniques are proposed. This article presents an original RRT*-Connect algorithm for the planning of obstacle avoidance paths on robotic arms. These strategies include implementing a target biasing algorithm, using elliptic space sampling to enhance the sampling process, the revision of the cost function to better guide path planning, and implementing an artificial potential field and gradient descent strategy to design adaptive step sizes. Furthermore, the use of segmented Bézier curves facilitates the generation of a more fluid trajectory when constructing the final path. The effectiveness of these augmentation strategies is corroborated by both simulations and experimental verification on a robotic arm. The simulations showed a 19.39% reduction in average run time and a 5% reduction in average path length compared to the existing RRT*-Connect algorithm. Therefore, The enhanced algorithm meets the requirement for optimal obstacle avoidance path planning by consistently finding the shortest path while avoiding obstacles.
为解决原始算法的局限性,提出了几种优化技术。本文提出了一种用于规划机器人手臂避障路径的原始RRT*-Connect算法。这些策略包括实施目标偏向算法、使用椭圆空间采样来增强采样过程、修正成本函数以更好地指导路径规划,以及实施人工势场和梯度下降策略来设计自适应步长。此外,在构建最终路径时,使用分段贝塞尔曲线有助于生成更流畅的轨迹。这些增强策略的有效性通过在机器人手臂上的模拟和实验验证得到了证实。与现有的RRT*-Connect算法相比,模拟结果显示平均运行时间减少了19.39%,平均路径长度减少了5%。因此,增强后的算法通过始终找到最短路径同时避开障碍物,满足了最优避障路径规划的要求。