Matsuoka Yoky, Brewer Bambi R, Klatzky Roberta L
The Robotics Institute, Carnegie Mellon University, Pittsburgh, PA 15213, USA.
J Neuroeng Rehabil. 2007 May 30;4:17. doi: 10.1186/1743-0003-4-17.
It is common for individuals with chronic disabilities to continue using the compensatory movement coordination due to entrenched habits, increased perception of task difficulty, or personality variables such as low self-efficacy or a fear of failure. Following our previous work using feedback distortion in a virtual rehabilitation environment to increase strength and range of motion, we address the use of visual feedback distortion environment to alter movement coordination patterns.
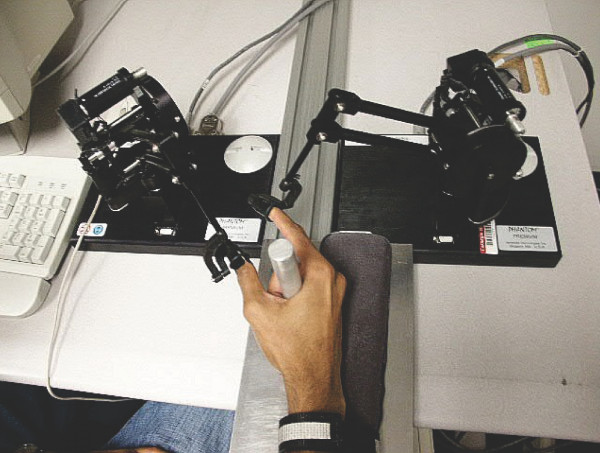
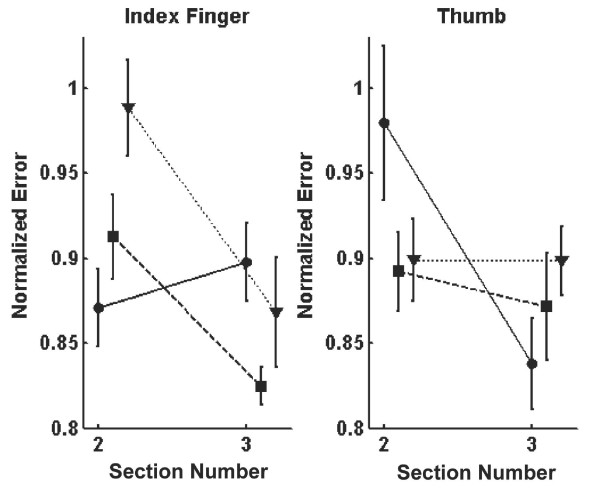
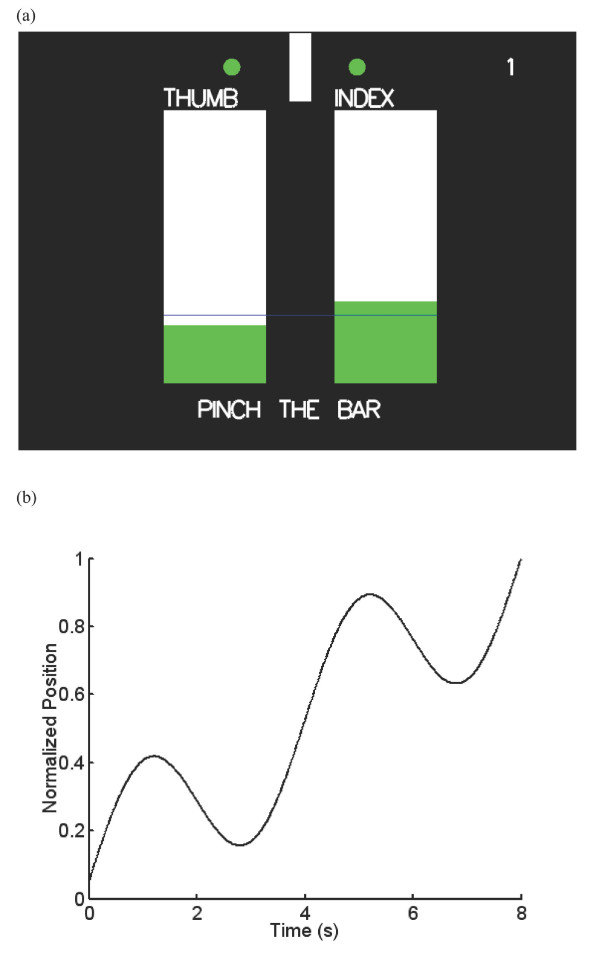
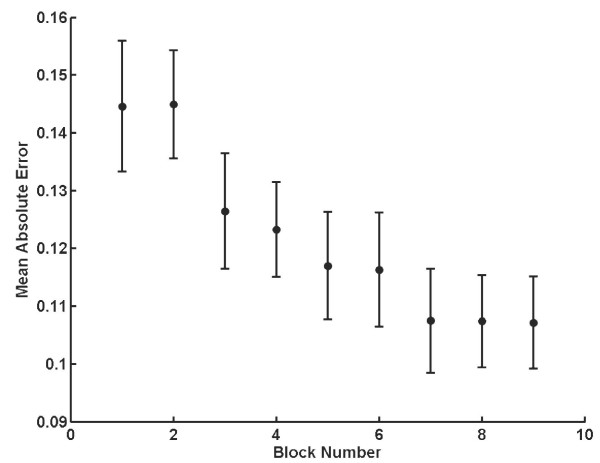
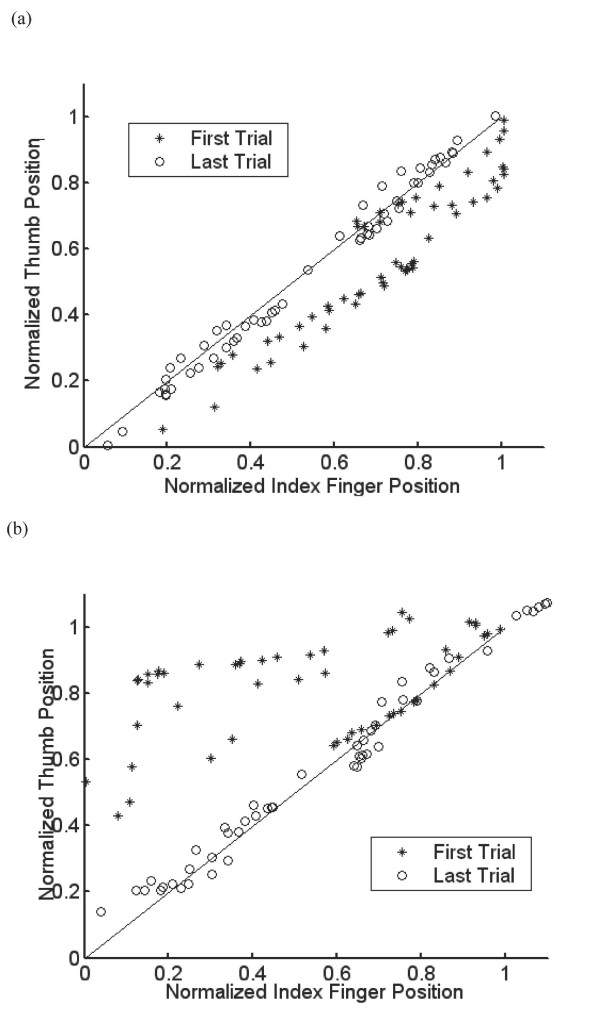
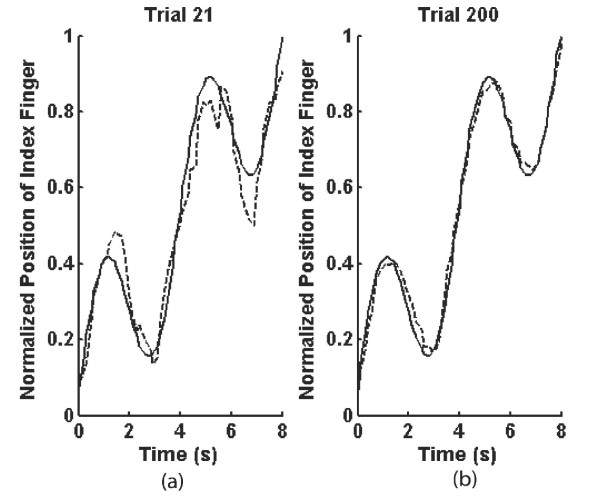
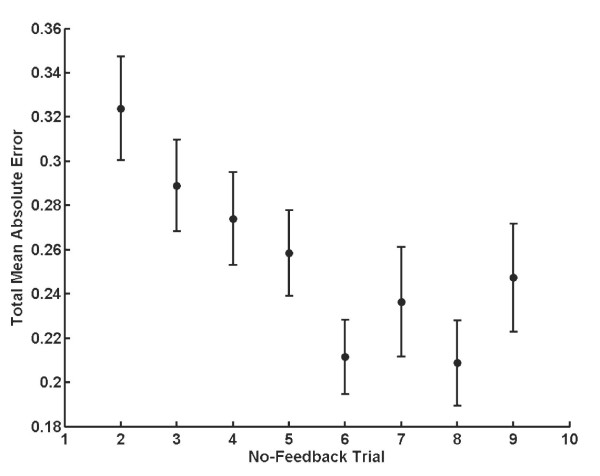
Fifty-one able-bodied subjects participated in the study. During the experiment, each subject learned to move their index finger and thumb in a particular target pattern while receiving visual feedback. Visual distortion was implemented as a magnification of the error between the thumb and/or index finger position and the desired position. The error reduction profile and the effect of distortion were analyzed by comparing the mean total absolute error and a normalized error that measured performance improvement for each subject as a proportion of the baseline error.
The results of the study showed that (1) different coordination pattern could be trained with visual feedback and have the new pattern transferred to trials without visual feedback, (2) distorting individual finger at a time allowed different error reduction profile from the controls, and (3) overall learning was not sped up by distorting individual fingers.
It is important that robotic rehabilitation incorporates multi-limb or finger coordination tasks that are important for activities of daily life in the near future. This study marks the first investigation on multi-finger coordination tasks under visual feedback manipulation.
由于习惯根深蒂固、对任务难度的感知增加或诸如自我效能感低或害怕失败等个性变量,慢性残疾个体继续使用代偿性运动协调是很常见的。继我们之前在虚拟康复环境中使用反馈失真来增加力量和运动范围的工作之后,我们探讨了使用视觉反馈失真环境来改变运动协调模式。
51名身体健全的受试者参与了该研究。在实验过程中,每个受试者在接受视觉反馈的同时学习以特定的目标模式移动食指和拇指。视觉失真通过放大拇指和/或食指位置与期望位置之间的误差来实现。通过比较平均总绝对误差和一个归一化误差来分析误差减少情况和失真的效果,该归一化误差衡量了每个受试者相对于基线误差的表现改善比例。
研究结果表明:(1)可以通过视觉反馈训练不同的协调模式,并将新模式转移到无视觉反馈的试验中;(2)一次扭曲单个手指会产生与对照组不同的误差减少情况;(3)扭曲单个手指并没有加快整体学习速度。
重要的是,机器人康复应纳入对近期日常生活活动很重要的多肢体或手指协调任务。本研究标志着对视觉反馈操纵下的多指协调任务的首次调查。