Institute of Agricultural Sciences, CSIC, Serrano 115B, 28006 Madrid, Spain.
Sensors (Basel). 2011;11(3):2304-18. doi: 10.3390/s110302304. Epub 2011 Feb 24.
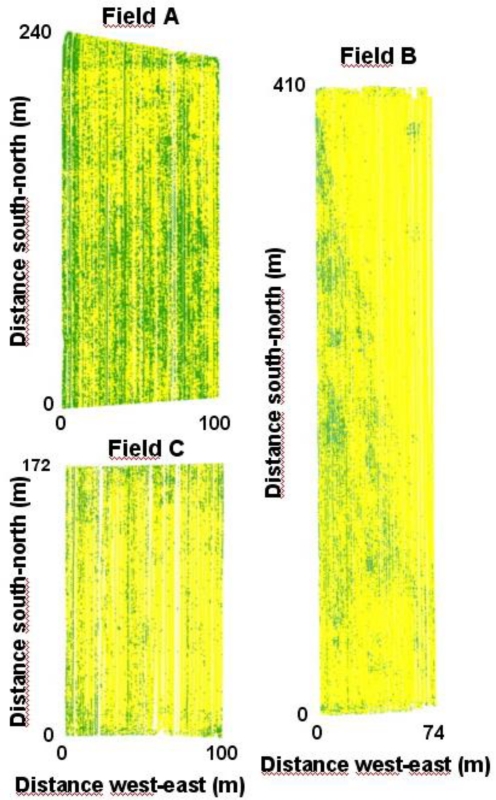
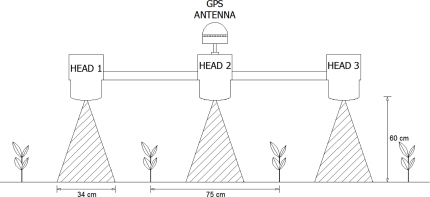
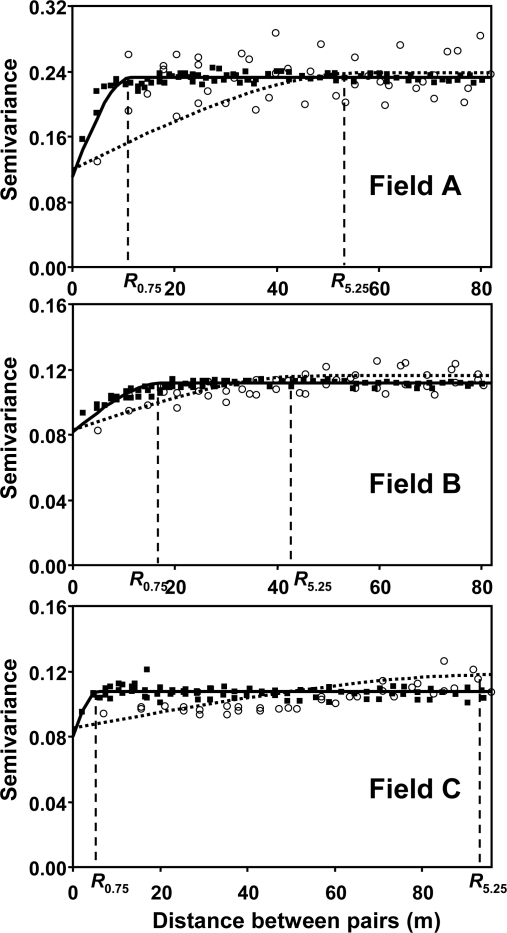
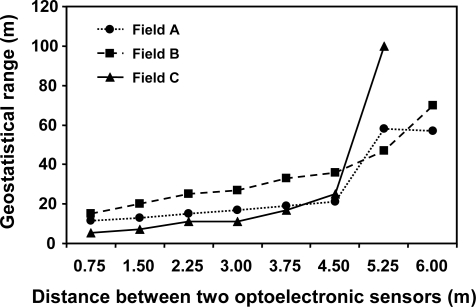
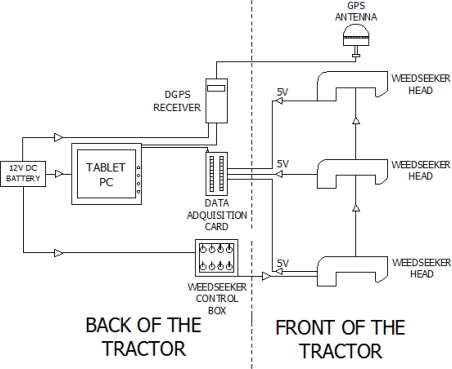
The main objectives of this study were to assess the accuracy of a ground-based weed mapping system that included optoelectronic sensors for weed detection, and to determine the sampling resolution required for accurate weed maps in maize crops. The optoelectronic sensors were located in the inter-row area of maize to distinguish weeds against soil background. The system was evaluated in three maize fields in the early spring. System verification was performed with highly reliable data from digital images obtained in a regular 12 m × 12 m grid throughout the three fields. The comparison in all these sample points showed a good relationship (83% agreement on average) between the data of weed presence/absence obtained from the optoelectronic mapping system and the values derived from image processing software ("ground truth"). Regarding the optimization of sampling resolution, the comparison between the detailed maps (all crop rows with sensors separated 0.75 m) with maps obtained with various simulated distances between sensors (from 1.5 m to 6.0 m) indicated that a 4.5 m distance (equivalent to one in six crop rows) would be acceptable to construct accurate weed maps. This spatial resolution makes the system cheap and robust enough to generate maps of inter-row weeds.
本研究的主要目的是评估一种基于地面的杂草测绘系统的准确性,该系统包括用于杂草检测的光电传感器,并确定在玉米作物中生成准确杂草图所需的采样分辨率。光电传感器位于玉米行间区域,以区分杂草与土壤背景。该系统在早春的三个玉米田中进行了评估。系统验证是通过在三个田间中常规的 12 m×12 m 网格中获得的数字图像获得的高度可靠的数据进行的。在所有这些样本点的比较中,光电测绘系统获取的杂草存在/不存在数据与图像处理软件(“地面实况”)得出的值之间显示出良好的关系(平均 83%的一致性)。关于采样分辨率的优化,详细地图(所有带有传感器的作物行,传感器之间的间隔为 0.75 m)与使用各种模拟传感器之间距离(从 1.5 m 到 6.0 m)获得的地图之间的比较表明,4.5 m 的距离(相当于每六行作物中的一行)可用于构建准确的杂草图。这种空间分辨率使系统具有足够的经济性和鲁棒性,可以生成行间杂草图。