Graduate School of Agricultural and Life Sciences, The University of Tokyo, 1-1-1, Yayoi, Bunkyo-ku, Tokyo 113-8657, Japan.
Department of Agricultural Chemistry, Meiji University, 1-1-1, Higashi-mita, Tama-ku, Kawasaki-shi, Kanagawa 214-8571, Japan.
Sensors (Basel). 2011;11(2):2166-2174. doi: 10.3390/s110202166. Epub 2011 Feb 15.
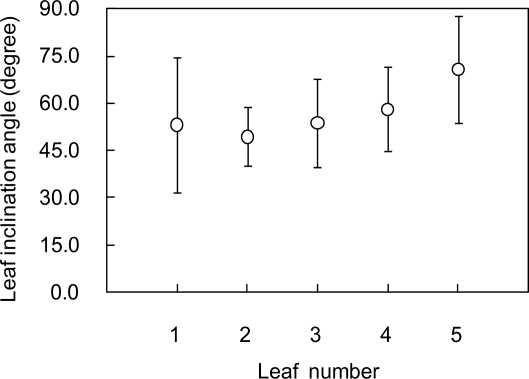
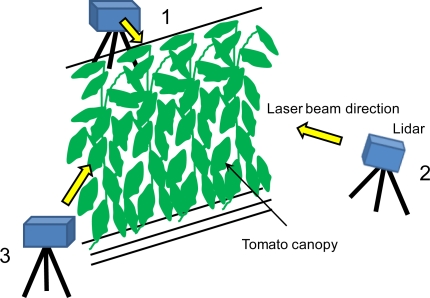
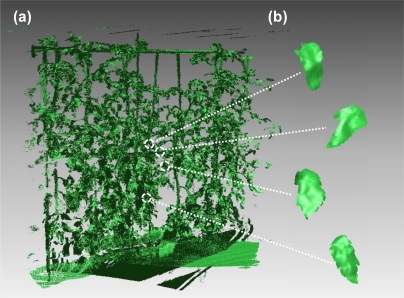
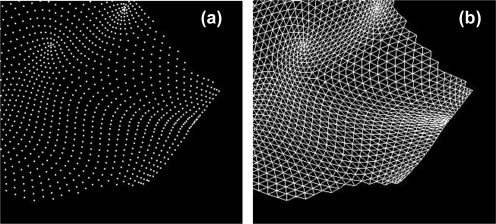
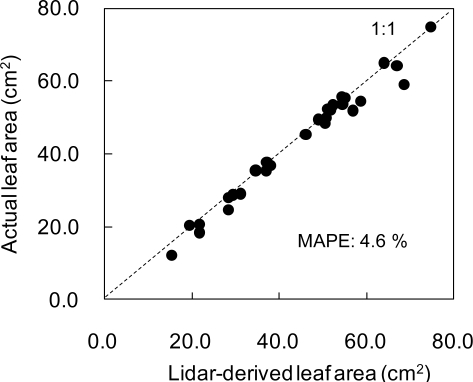
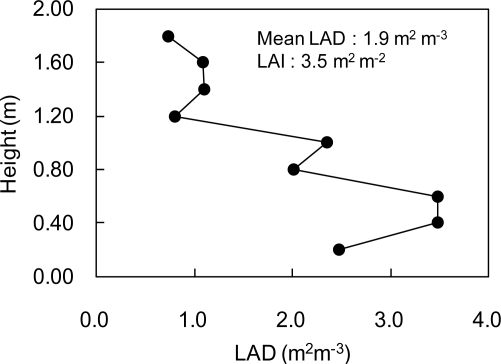
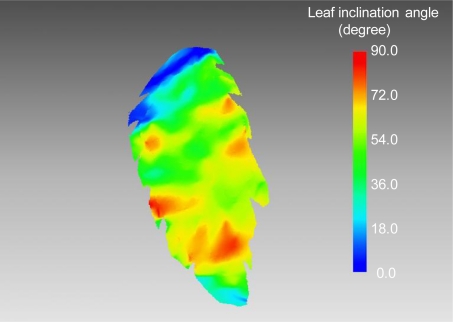
In the present study, an attempt was made to produce a precise 3D image of a tomato canopy using a portable high-resolution scanning lidar. The tomato canopy was scanned by the lidar from three positions surrounding it. Through the scanning, the point cloud data of the canopy were obtained and they were co-registered. Then, points corresponding to leaves were extracted and converted into polygon images. From the polygon images, leaf areas were accurately estimated with a mean absolute percent error of 4.6%. Vertical profile of leaf area density (LAD) and leaf area index (LAI) could be also estimated by summing up each leaf area derived from the polygon images. Leaf inclination angle could be also estimated from the 3-D polygon image. It was shown that leaf inclination angles had different values at each part of a leaf.
在本研究中,尝试使用便携式高分辨率扫描激光雷达生成番茄冠层的精确三维图像。通过激光雷达从周围三个位置对番茄冠层进行扫描。通过扫描,获得了冠层的点云数据,并对其进行了配准。然后,提取出对应叶片的点,并将其转换为多边形图像。从这些多边形图像中,可以准确估计叶片面积,平均绝对百分比误差为 4.6%。通过对多边形图像中每个叶片面积的求和,还可以估算叶片面积密度(LAD)和叶面积指数(LAI)的垂直分布。还可以从三维多边形图像中估算叶片倾斜角。结果表明,叶片各部位的叶片倾斜角值不同。